Other Parts Discussed in Thread: UNIFLASH, DCA1000EVM
Hi,
I am using dual boot with Ubuntu 16.04 LTS.
I contacted TI's Japanese user support before,
the point cloud of ROS needed the following.
I corresponded to these.
1.For Ros,OutBoxDemo Flash in mmwave_sdk_01_00_00_05.
2. ~/catkin_ws/src/ti_mmwave_rospkg/mmWave_nodelets.xml
<depend>serial<depend/> → <depend>serial</depend> I changed and catkin make.
I flash them by UniFlash:
C:\ti\mmwave_sdk_01_00_00_05\firmware\radarss
xwr12xx_xwr14xx_radarss.bin
C:\ti\mmwave_sdk_01_00_00_05\packages\ti\demo\xwr14xx\mmw
xwr14xx_mmw_demo_mss.bin
I was displaying Rviz with the following command.
>cd ~/catkin_ws
>source devel/setup.bash
>roslaunch ti_mmwave_rospkg rviz_1443_3d.launch
I have been displaying 3D point clouds all the time.
The last one to show about a month ago.
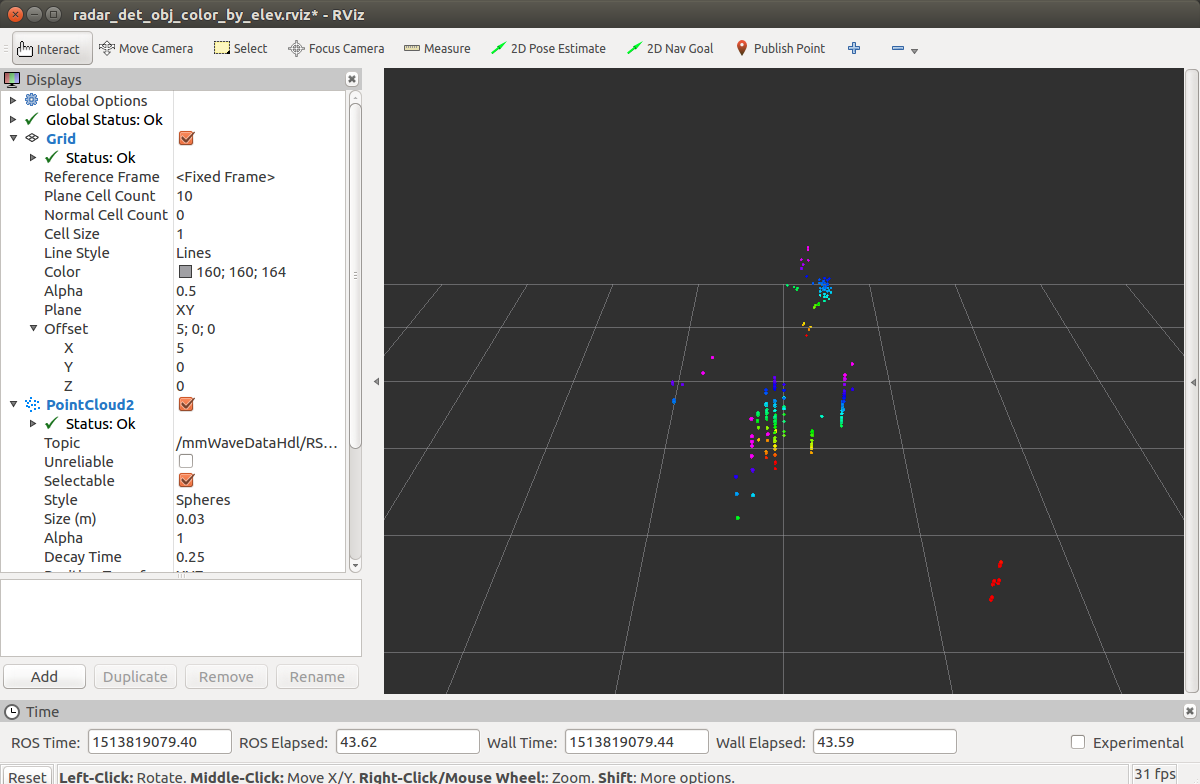
But today, I runed the same command to bring Rviz up,
but the point cloud is no longer displayed.

I also have IWR 1642, so I tried 2D, but it is the same.
I also have a VertualBox environment, I tried it, but it is the same.
Copy console:
ROS log file:
Regards,
user5205609