Hello team,
One of my customer's project, the number of point cloud data needs 128 or more in 3D mode. 3D mode, I mean 3TX and 4RX is activated in demo Visualizer for IWR1443BOOST.
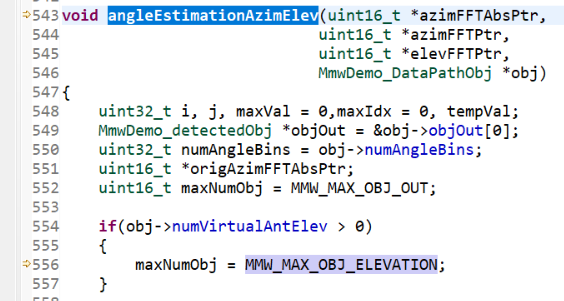
Looking at following threads, MMW_MAX_OBJ_OUT in source code of SDK defines the number of detected object but it seems to work only for 2D mode.
https://e2e.ti.com/support/sensor/mmwave_sensors/f/1023/t/647223
https://e2e.ti.com/support/sensor/mmwave_sensors/f/1023/p/624965/2306304
So could you please explain how to increase the number of pint cloud data in 3D mode? 128 points is minimum they want, if possible 256 to 1028 points is preferable.
Best Regards,
Katsuhiro