Other Parts Discussed in Thread: IWR1642, MMWAVE-SDK,
Hi,
I used the same method to send different ID messages:
1) Create new message box objects with the new message IDs
2) Transmit with the new message ID
3) CAN_setOptions() to power down
4) CAN_setOptions() to wake up
... some time later
5) Delete the msg box object.
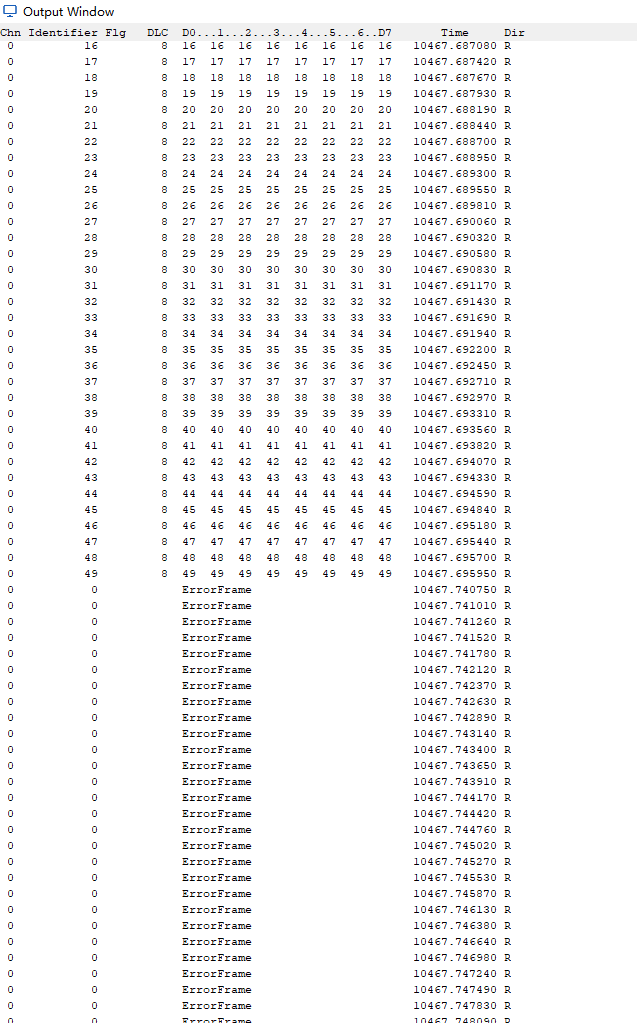
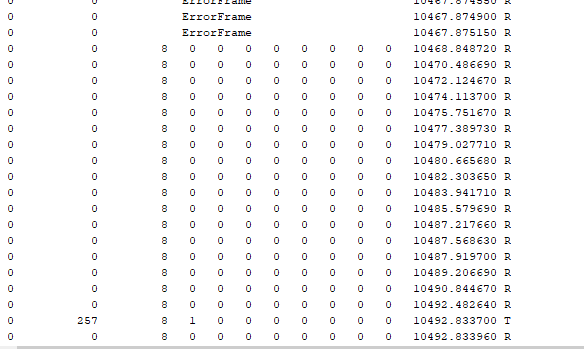
It is work ,but it has a serious problem!!! It can't recive Msg.The RX is not work!!!
Because DCAN is frequently power down and wake up,the recive msg maybe lost.
I can't receive messages while sending some message.!!!
How to solve problem?The problem is urgent,I hope you can reply to me as soon as possible.
Thank you