



Hi,
I had see your test result on Te Web.

about the test result
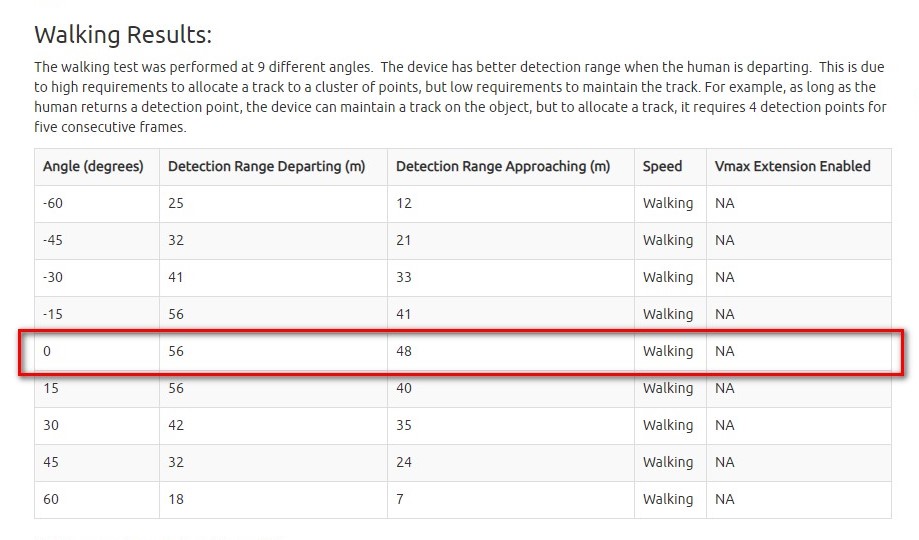
If I want to approch the result ( Angle(degress) 0 -> it's mean? , Detection Range Departing 56, Detection Range Approaching 48)
How can I set the evniroment,
below is my test enviornmet ,but Detection Range Depating(m) about 45, Detection Range Approaching about 20 ,please help which is not correct...
1) IWR1642 HW: ES 2.0
2) IWR1642 FW: mmwave_industrial_toolbox_2_5_1/traffic_monitoring_16xx/...traffic_monitoring_16xx_lab.bin
3) config file: mmwave_industrial_toolbox_2_5_1/chirps/images/People+Tracking+and +Counting+Application/50m_longRangeTM
4 )My EVM was mounted at 2.25 meters,
5) tilted about 10 degrees down.
/Melvin
