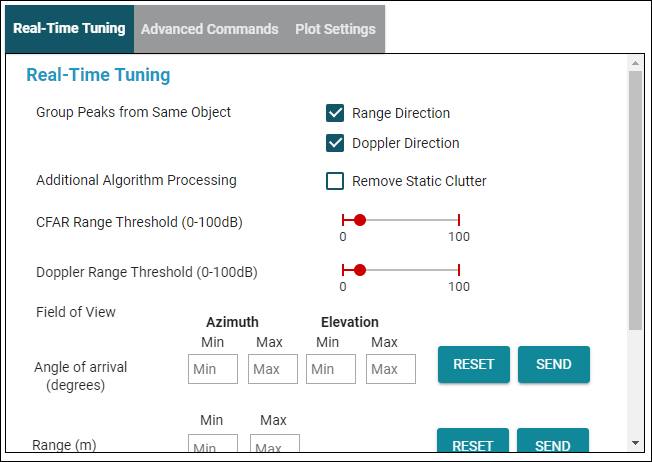
I want to use TI Demo Visualizer to visualize the 3D point output from IWR6843. But I got a very sparse point cloud. I want to know how to adjust the parameters to show a denser point cloud. It would be better to depict the general shape of the detected object.
I would be appreciate if someone can help me. Thank you in advance!