Tool/software: Code Composer Studio
I found a similar problem when using SRR,I put the radar on the side rear of the car as a Blind spot detection System.
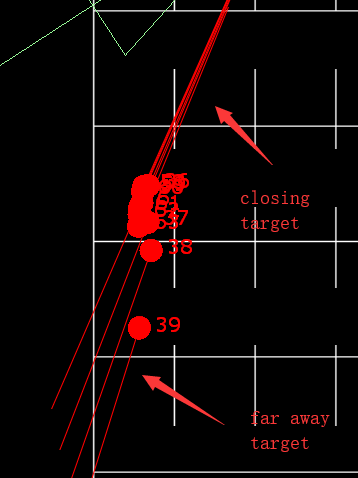
When I drive at a speed of less than 30km / h along the guardrail of the road, it seems that everything is OK,When the driving speed is more than 30 km / h, multiple closing targets will appear stably.These close targets are original target points, not tracked targets,I want to know how these close targets come about?