Other Parts Discussed in Thread: IWR6843ISK, IWR6843, SYSBIOS
Hello!
I'm working on hard-coded configuration of IWR6843ISK ODS sensor without using of CLI functions. I use ods_point_cloud_68xx_hwa lab as a reference project.
I have Init, mmwaveCtrl and DPM_Task. Instead of CLI_task, I have SensorConfig task.
In SensorConfig task I call MMWave_open and MMWave_config and after that I call dataPathConfig() function that should send DPC_OBJDET_IOCTL__STATIC_PRE_START_COMMON_CFG and DPC_OBJDET_IOCTL__STATIC_PRE_START_CFG to the DPC.
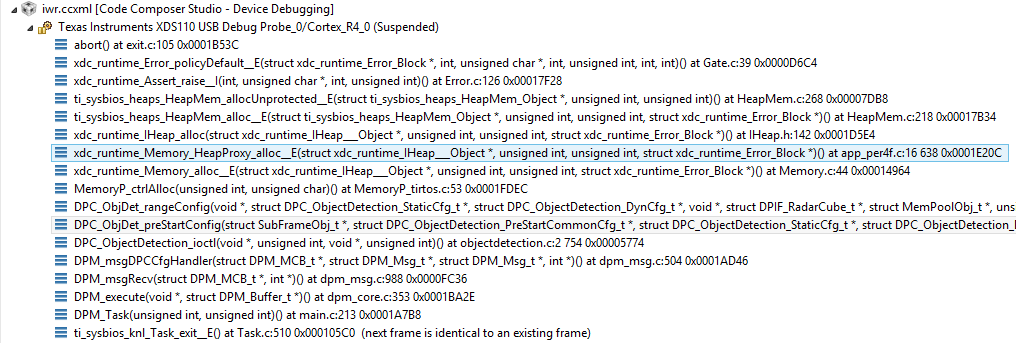
DPC_OBJDET_IOCTL__STATIC_PRE_START_COMMON_CFG is done with no errors, but when I fill DPC_ObjectDetection_PreStartCfg structure with values based on profile_iwr6843_ods_3d.cfg from ods_point_cloud_68xx_hwa lab, and send DPC_OBJDET_IOCTL__STATIC_PRE_START_CFG I get
ti.sysbios.heaps.HeapMem: line 259: assertion failure: A_zeroBlock: Cannot allocate size 0
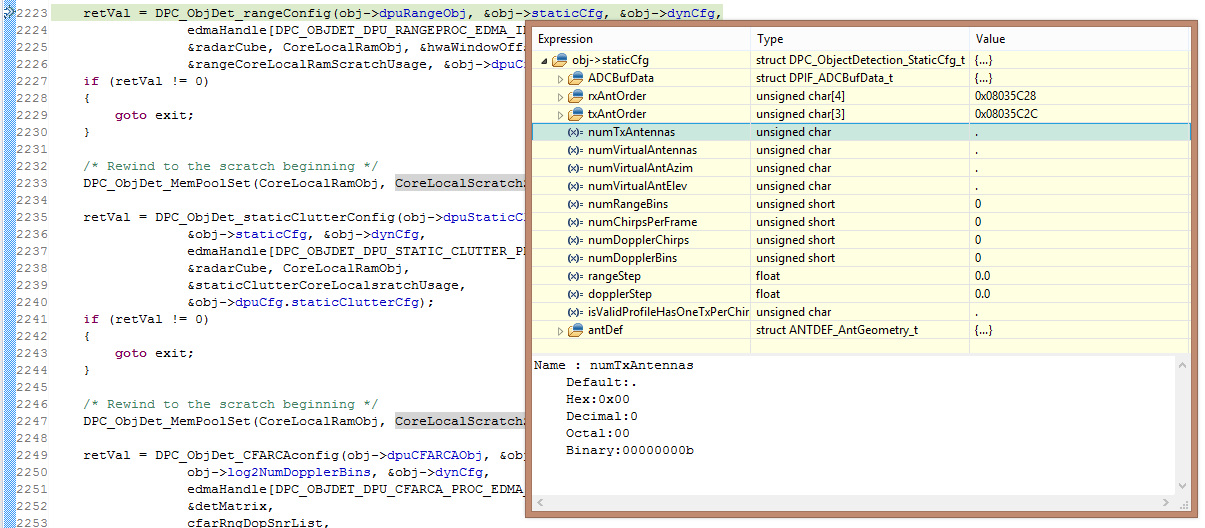
I did compare content of DPC_ObjectDetection_PreStartCfg in my project and in ods_point_cloud_68xx_hwa in debug session, both structure are almost identical.
Can you please suggest the way to fix this issue?
Here is my code for dataPathConfig() function.
int32_t dataPathConfig (void){
DPC_ObjectDetection_PreStartCommonCfg preStartCommonCfg;
DPC_ObjectDetection_PreStartCfg preStartCfg;
DPC_ObjectDetection_StaticCfg staticCfg;
DPC_ObjectDetection_DynCfg dynCfg;
int32_t retVal, errCode;
// ---------- sending DPCpreStartCommonConfig
preStartCommonCfg.numSubFrames = 1;
preStartCommonCfg.antDef = antDef_IWR6843ODS;
errCode = DPM_ioctl(dpm, DPC_OBJDET_IOCTL__STATIC_PRE_START_COMMON_CFG,
&preStartCommonCfg, sizeof(DPC_ObjectDetection_PreStartCommonCfg));
if (errCode == 0) {
printf("DPM pre-start common cfg OK!!!\n");
} else {
printf("DPM pre-start common cfg error %d\n", errCode);
}
// ---------- filling and sending DPCpreStartConfig
preStartCfg.subFrameNum = 1;
// filling staticCfg
// ---------- ADCBuf data
staticCfg.ADCBufData.data = (void *) SOC_XWR68XX_MSS_ADCBUF_BASE_ADDRESS;
staticCfg.ADCBufData.dataProperty.adcBits = 2;
staticCfg.ADCBufData.dataProperty.dataFmt = DPIF_DATAFORMAT_COMPLEX16_IMRE;
staticCfg.ADCBufData.dataProperty.interleave = DPIF_RXCHAN_NON_INTERLEAVE_MODE;
staticCfg.ADCBufData.dataProperty.numAdcSamples = profileCfg.numAdcSamples;
staticCfg.ADCBufData.dataProperty.numChirpsPerChirpEvent = 1;
// -- antenna number and order, ADCBuf offsets
uint8_t numRxAntennas = 0U;
uint8_t channel;
int32_t rxChanOffsetIndx = 0;
uint16_t currentChanOffset = 0;
uint16_t numBytePerSample = 4U;
uint32_t chanDataSize = profileCfg.numAdcSamples * numBytePerSample;
chanDataSize = (chanDataSize + 15U) / 16U * 16U;
for (channel = 0U; channel < SYS_COMMON_NUM_RX_CHANNEL; channel++) {
if (openCfg.chCfg.rxChannelEn & (0x1U << channel)) {
staticCfg.rxAntOrder[numRxAntennas] = channel;
numRxAntennas++;
staticCfg.ADCBufData.dataProperty.rxChanOffset[rxChanOffsetIndx++] = currentChanOffset;
currentChanOffset += chanDataSize * staticCfg.ADCBufData.dataProperty.numChirpsPerChirpEvent;
} else {
staticCfg.rxAntOrder[channel] = 0U;
}
}
staticCfg.ADCBufData.dataProperty.numRxAntennas = numRxAntennas;
staticCfg.ADCBufData.dataSize = numRxAntennas * profileCfg.numAdcSamples * sizeof(cmplx16ImRe_t);
for (channel = 0U; channel < SYS_COMMON_NUM_TX_ANTENNAS; channel++) {
staticCfg.txAntOrder[channel] = mathUtils_floorLog2(chirpCfg[channel].txEnable);
}
//-------sending commands to в ADCBuf
uint32_t rxChanMask = 0xF;
retVal = ADCBuf_control(adcbufHandle, ADCBufMMWave_CMD_CHANNEL_DISABLE, (void *)&rxChanMask);
if (retVal < 0) {
printf("ADCBufMMWave_CMD_CHANNEL_DISABLE error\n");
} else {
printf("ADCBufMMWave_CMD_CHANNEL_DISABLE OK!\n");
}
ADCBuf_dataFormat dataFormat;
dataFormat.adcOutFormat = staticCfg.ADCBufData.dataProperty.dataFmt;
dataFormat.channelInterleave = staticCfg.ADCBufData.dataProperty.interleave;
dataFormat.sampleInterleave = 1;
retVal = ADCBuf_control(adcbufHandle, ADCBufMMWave_CMD_CONF_DATA_FORMAT, (void *) &dataFormat);
if (retVal < 0) {
printf("ADCBufMMWave_CMD_CONF_DATA_FORMAT error\n");
} else {
printf("ADCBufMMWave_CMD_CONF_DATA_FORMAT OK!\n");
}
ADCBuf_RxChanConf rxChanConf;
memset((void*)&rxChanConf, 0, sizeof(ADCBuf_RxChanConf));
for (channel = 0; channel < SYS_COMMON_NUM_RX_CHANNEL; channel++){
if(openCfg.chCfg.rxChannelEn & (0x1U << channel)){
rxChanConf.channel = channel;
retVal = ADCBuf_control(adcbufHandle, ADCBufMMWave_CMD_CHANNEL_ENABLE, (void *)&rxChanConf);
if (retVal < 0) {
printf("ADCBufMMWave_CMD_CHANNEL_ENABLE channel %d error\n", channel);
} else {
printf("ADCBufMMWave_CMD_CHANNEL_ENABLE OK!\n");
}
}
}
uint32_t chirpThresholdVal = staticCfg.ADCBufData.dataProperty.numChirpsPerChirpEvent; // привести к 4-байтной переменной
retVal = ADCBuf_control(adcbufHandle, ADCBufMMWave_CMD_SET_PING_CHIRP_THRESHHOLD, (void *)&chirpThresholdVal);
if (retVal < 0) {
printf("ADCBufMMWave_CMD_SET_PING_CHIRP_THRESHHOLD error\n");
} else {
printf("ADCBufMMWave_CMD_SET_PING_CHIRP_THRESHHOLD OK!\n");
}
retVal = ADCBuf_control(adcbufHandle, ADCBufMMWave_CMD_SET_PONG_CHIRP_THRESHHOLD, (void *)&chirpThresholdVal);
if (retVal < 0) {
printf("ADCBufMMWave_CMD_SET_PONG_CHIRP_THRESHHOLD error\n");
} else {
printf("ADCBufMMWave_CMD_SET_PONG_CHIRP_THRESHHOLD OK!\n");
}
//-------number of virtual antennas
uint32_t numTxAntAzim = 2; // azimTxAntMask = 0b101
uint32_t numTxAntElev = 1; // elevTxAntMask = 0b010
staticCfg.numVirtualAntAzim = numTxAntAzim * staticCfg.ADCBufData.dataProperty.numRxAntennas; // 2 * 4 = 8
staticCfg.numVirtualAntElev = numTxAntElev * staticCfg.ADCBufData.dataProperty.numRxAntennas; // 1 * 4 = 4
staticCfg.numVirtualAntennas = staticCfg.numVirtualAntAzim + staticCfg.numVirtualAntElev; // 8 + 4 = 12
//-------
int16_t frameTotalChirps = (ctrlCfg.u.frameCfg.frameCfg.chirpEndIdx - ctrlCfg.u.frameCfg.frameCfg.chirpStartIdx) + 1;
staticCfg.numChirpsPerFrame = frameTotalChirps * ctrlCfg.u.frameCfg.frameCfg.numLoops;
//-------
staticCfg.numRangeBins = mathUtils_pow2roundup(profileCfg.numAdcSamples);
staticCfg.rangeStep =
SPEED_OF_LIGHT_IN_METERS_PER_SEC *
profileCfg.digOutSampleRate * 1e3 /
(2 * profileCfg.freqSlopeConst * ((freqScaleFactor*1e3*900)/(1U << 26)) * 1e12 * staticCfg.numRangeBins);
//-------
staticCfg.numTxAntennas = 3;
staticCfg.numDopplerChirps = staticCfg.numChirpsPerFrame / staticCfg.numTxAntennas;
staticCfg.numDopplerBins = mathUtils_pow2roundup(staticCfg.numDopplerChirps);
staticCfg.dopplerStep = SPEED_OF_LIGHT_IN_METERS_PER_SEC /
(2.0 * profileCfg.startFreqConst/(1U << 26)*freqScaleFactor*1e9 *
(profileCfg.idleTimeConst+ profileCfg.rampEndTime)/1000.*10*1.e-6 *
staticCfg.numDopplerBins *
staticCfg.numTxAntennas);
//----
staticCfg.isValidProfileHasOneTxPerChirp = 1;
//---------------------- adding staticCfg
preStartCfg.staticCfg = staticCfg;
// filling dynCfg
//------ range CFAR
DPU_CFARCAProc_CfarCfg *cfarCfgRange = &dynCfg.cfarCfgRange;
cfarCfgRange->averageMode = 2; // CASO
cfarCfgRange->winLen = 8;
cfarCfgRange->guardLen = 4;
cfarCfgRange->noiseDivShift = 3;
cfarCfgRange->cyclicMode = 0;
cfarCfgRange->thresholdScale = convertCfarToLinear(15.0, 12); // 480.0 for 15.0 dB
cfarCfgRange->peakGroupingEn = 0;
//------ Doppler CFAR
DPU_CFARCAProc_CfarCfg *cfarCfgDoppler = &dynCfg.cfarCfgDoppler;
cfarCfgDoppler->averageMode = 0; // CA
cfarCfgDoppler->winLen = 4;
cfarCfgDoppler->guardLen = 2;
cfarCfgDoppler->noiseDivShift = 3;
cfarCfgDoppler->cyclicMode = 1;
cfarCfgDoppler->thresholdScale = convertCfarToLinear(15.0, staticCfg.numVirtualAntennas); // 480.0 for 15.0 dB
cfarCfgDoppler->peakGroupingEn = 0;
cfarCfgDoppler->peakGroupingScheme = 0;
//-------
DPU_AoAProc_MultiObjBeamFormingCfg *multiObjBeamFormingCfg = &dynCfg.multiObjBeamFormingCfg;
multiObjBeamFormingCfg->enabled = 1;
multiObjBeamFormingCfg->multiPeakThrsScal = 0.5;
//------ Calib DC Range Signature
DPU_RangeProc_CalibDcRangeSigCfg *calibDcRangeSigCfg = &dynCfg.calibDcRangeSigCfg;
calibDcRangeSigCfg->enabled = 0;
calibDcRangeSigCfg->negativeBinIdx = -5;
calibDcRangeSigCfg->positiveBinIdx = 8;
calibDcRangeSigCfg->numAvgChirps = 256;
//------- Clutter Removal
DPC_ObjectDetection_StaticClutterRemovalCfg_Base *staticClutterRemovalCfg = &dynCfg.staticClutterRemovalCfg;
staticClutterRemovalCfg->enabled = 0; // disable
//------
DPU_AoAProc_FovAoaCfg *fovAoaCfg = &dynCfg.fovAoaCfg;
fovAoaCfg->minAzimuthDeg = -90;
fovAoaCfg->maxAzimuthDeg = 90;
fovAoaCfg->minElevationDeg = -90;
fovAoaCfg->maxElevationDeg = 90;
//------
DPU_CFARCAProc_FovCfg *fovRange = &dynCfg.fovRange;
fovRange->min = 0.25;
fovRange->max = 15.0;
//------
DPU_CFARCAProc_FovCfg *fovDoppler = &dynCfg.fovDoppler;
fovDoppler->min = -13.39;
fovDoppler->max = 13.39;
//------ Extended Max Velocity
DPU_AoAProc_ExtendedMaxVelocityCfg *extMaxVelCfg = &dynCfg.extMaxVelCfg;
extMaxVelCfg->enabled = 0; // disable
//------
dynCfg.prepareRangeAzimuthHeatMap = 0;
preStartCfg.dynCfg = dynCfg;
errCode = DPM_ioctl(dpm, DPC_OBJDET_IOCTL__STATIC_PRE_START_CFG,
&preStartCfg,
sizeof(DPC_ObjectDetection_PreStartCfg));
if (errCode == 0)
{
printf("DPM pre-start cfg OK!!!\n");
}
else
{
printf("DPM pre-start cfg error %d\n", errCode);
}
return 0;
}
I'm using mmwaveSDK 3.3.
__
Denis