Hi,
Based on the previous suggestions I have tested the .cfg file on the long range demo by making some changes in the parameters of the function that were mentioned earlier.
sensorStop flushCfg dfeDataOutputMode 1 channelCfg 15 7 0 adcCfg 2 1 adcbufCfg -1 0 1 1 1 profileCfg 0 60 35 6 43.0 394758 0 8.241 1 125 3433 0 0 48 chirpCfg 0 0 0 0 0 0 0 1 chirpCfg 1 1 0 0 0 0 0 4 frameCfg 0 1 128 0 100 1 0 lowPower 0 0 guiMonitor -1 1 0 0 0 0 0 cfarCfg -1 0 2 8 4 3 0 10 0 cfarCfg -1 1 0 4 2 3 1 10 0 multiObjBeamForming -1 1 1 clutterRemoval -1 1 calibDcRangeSig -1 0 -5 8 256 extendedMaxVelocity -1 0 bpmCfg -1 0 0 1 lvdsStreamCfg -1 0 0 0 compRangeBiasAndRxChanPhase 0.0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 measureRangeBiasAndRxChanPhase 0 1.5 0.2 CQRxSatMonitor 0 3 4 63 0 CQSigImgMonitor 0 127 4 analogMonitor 0 0 aoaFovCfg -1 -90 90 -90 90 cfarFovCfg -1 0 0 159.0 cfarFovCfg -1 1 -80 80 %SceneryParam -50 50 0.5 60 -6 6 staticBoundaryBox -50 50 0.5 60 -6 6 boundaryBox -50 50 0.5 60 -6 6 gatingParam 4 6 6 6 10 stateParam 4 10 60 600 20 600 allocationParam 30 30 0.5 3 2 2 maxAcceleration 0.1 0.1 0.1 trackingCfg 1 2 250 20 78 121 99 sensorPosition 2 0 0 presenceBoundaryBox -3 3 2 6 0.5 2.5 sensorStart
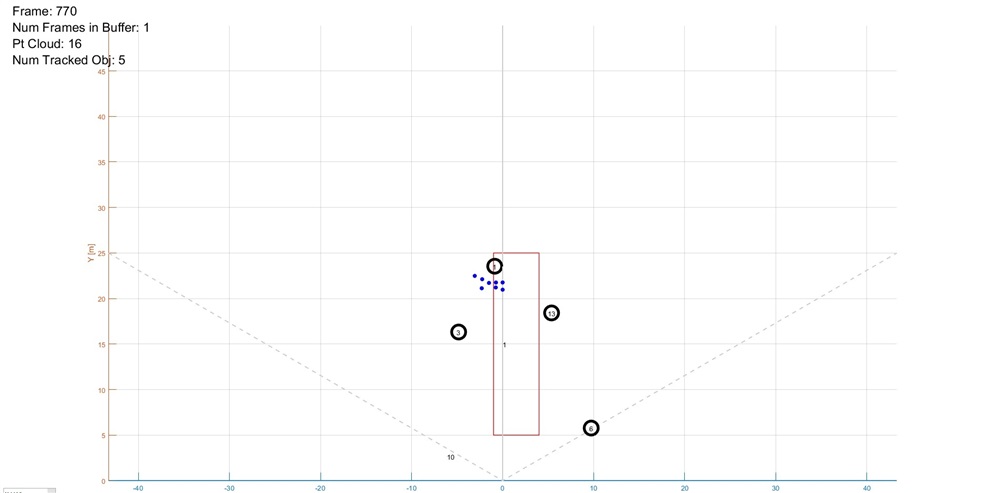
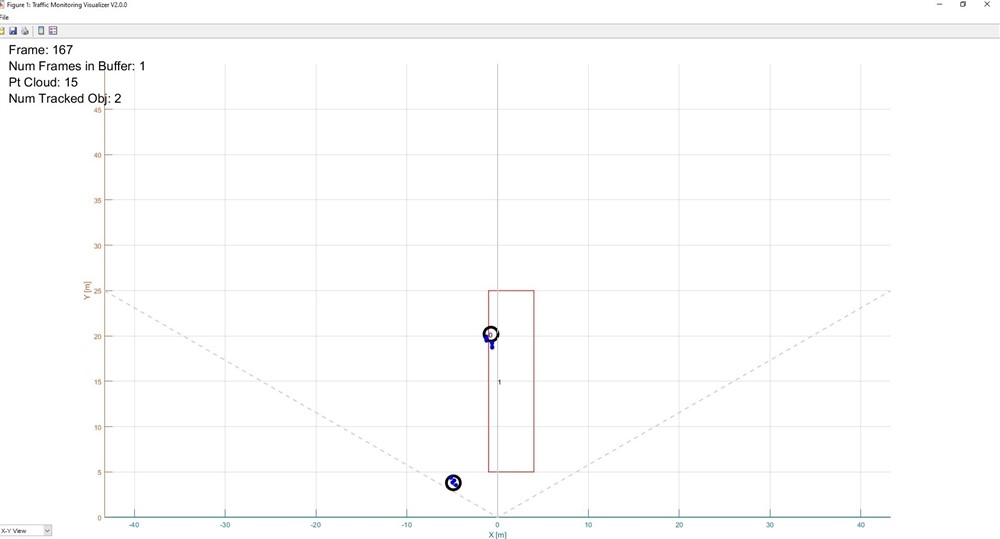
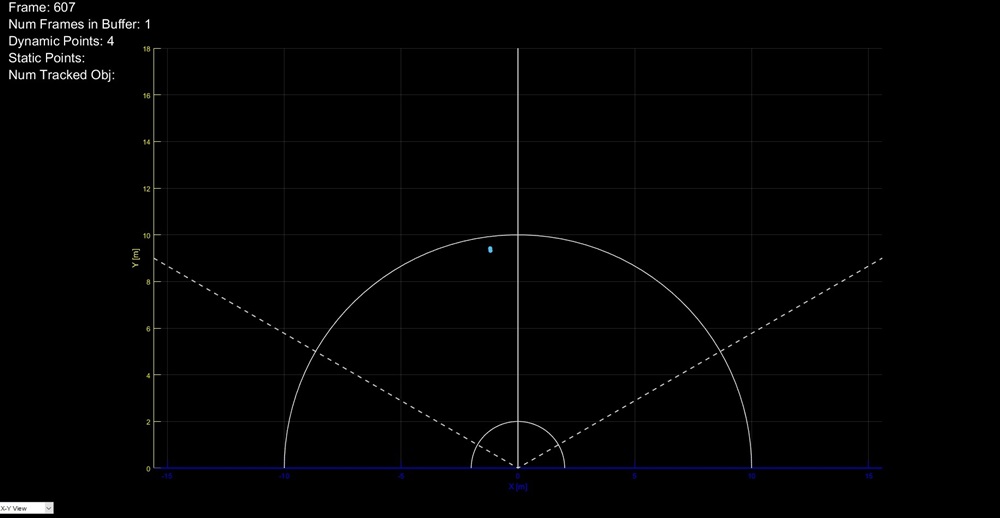
I tired running .cfg by change one parameter at a time and that didn't make much difference. Making both the changes on the functions it got little better but I still see some changes that are need to be made. Also I do not see an impact of changing the Fov in aoaFovCfg. The targeted points on the long range that are passing by somehow leaving the trace and you see it as a point for a while and then either disappears or stays. What could be the possible highest threshold for cfarFovCfg. What could be the possible reason for the delay ? Now I would be testing the same with area scanner.
Regards,
Divya