Other Parts Discussed in Thread: AWR1843
Hello Ki,
I use AWR1843, XSD110 debugger and ccs software to build a debugging environment, and use python to write scripts to call the methods in the DSS interface to achieve automated testing.I have the following confusions:
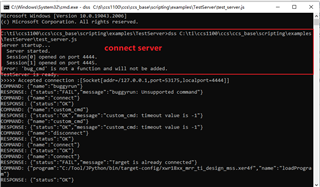
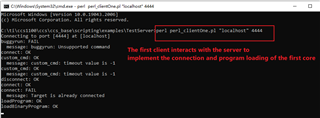
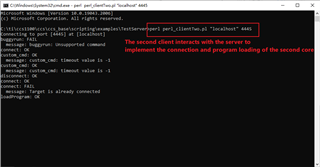
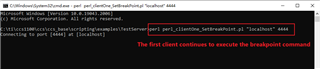
1. Can the API connect to the already opened ccs window and call the css window through other API connections? We want to encapsulate the functionality of target board connection loading, execution, adding/removing breakpoints, reading clock values, etc. They are written into separate scripts, and after the target board connection loader runs, it can continue to execute the next script to achieve a coherent function. For example, the target board is connected and loaded ---> increase the breakpoint, read the value of the timer (at this time, the target board has been suspended when encountering a breakpoint) ---> continue to run the target board, reach the breakpoint again, and read the clock value , These processes are implemented by scripts individually (after the first script is connected and loaded, subsequent scripts do not need to be loaded repeatedly), and executing different scripts can control the same debug window. If so, please give an example for reference, Thanks!
2.The .xml log generated after the script is executed is blank when opened with a browser. After changing the suffix to .html, the content is not presented in table form.