Part Number: TM4C123GH6PM
Tool/software: Code Composer Studio
Hi
I am new to TI MCU's/CSS (and fairly new to MCU's in general).
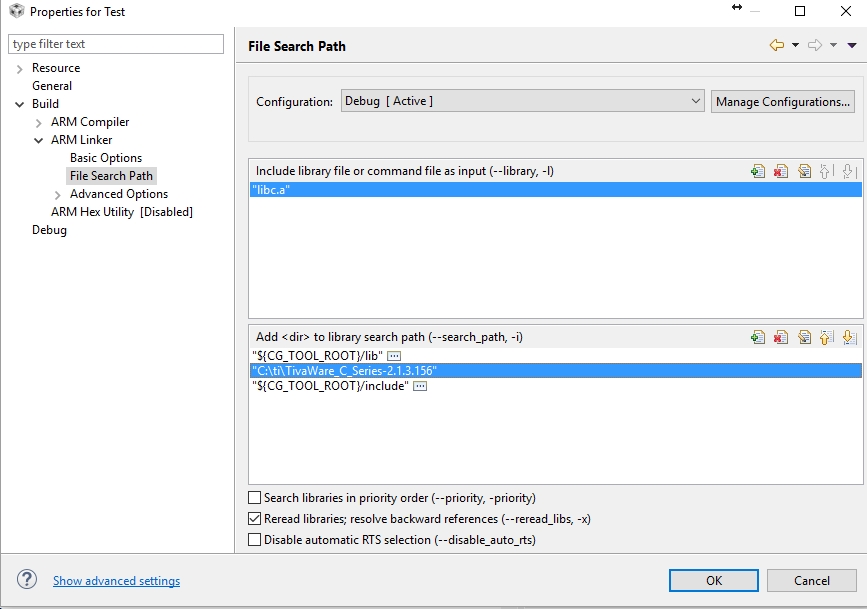
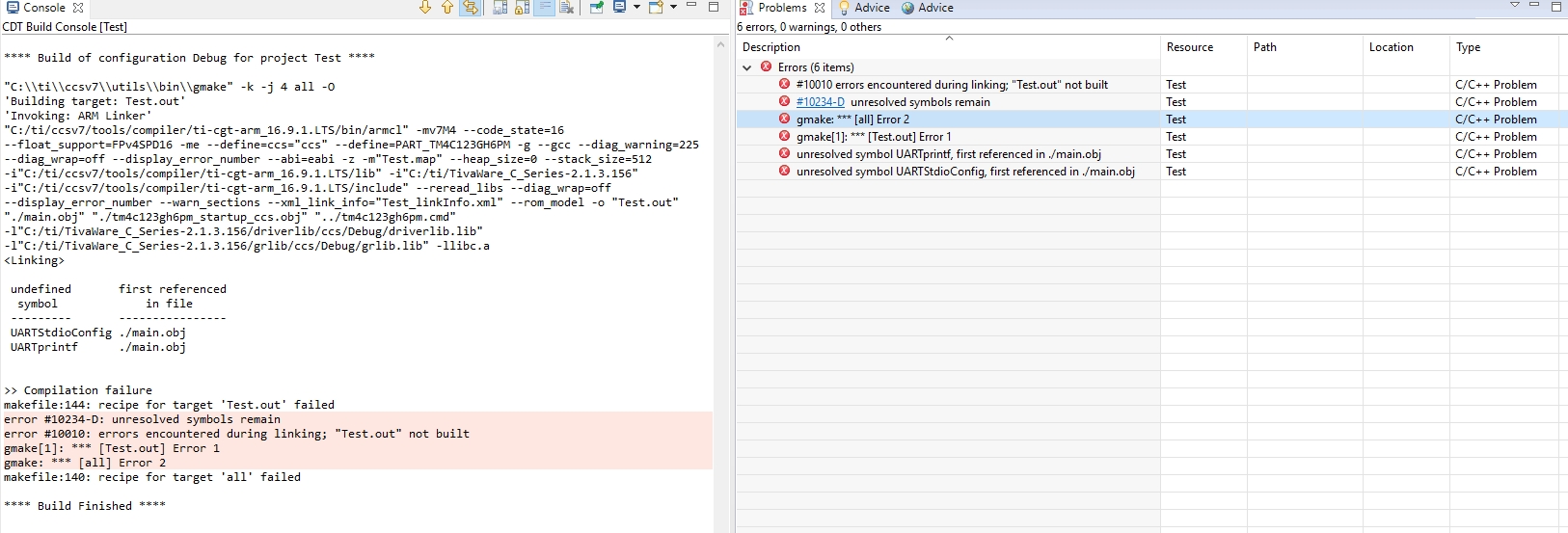
I tried to build an old project for the MCU but get errors because include files and DriverLib are not accessible, the files I try to include are:
I am trying to modify the Slave part of the attached project, the changes I made are not included, this is the project copied of GitHub, I assume the project was ok when it was uploaded.
#include <stdint.h>
#include <stdbool.h>
#include "inc/hw_memmap.h"
#include "inc/hw_types.h"
#include "inc/hw_can.h"
#include "inc/hw_ints.h"
#include "driverlib/can.h"
#include "driverlib/interrupt.h"
#include "driverlib/sysctl.h"
#include "driverlib/gpio.h"
#include "driverlib/uart.h"
#include "driverlib/pin_map.h"
#include "utils/uartstdio.h"
It seems that the files from memmap.h and below are not available, I assume all of these files can somehow be added to the tools by downloading some "package" to CCS, is this correct ?
How can I get it ?
Please remember I am NEW to this so please bare with me and explain "For dummies".
Thanks for any help, Petertiva-can-bus-master.zip