Part Number: CCSTUDIO
Other Parts Discussed in Thread: AM3359, SYSBIOS
Tool/software: Code Composer Studio
Dear all,
I am developing a data translation method in CCS and I am facing the following issue.
Given : A header file consisting of typedef struct with char* variables.
Requirement : To read values of these variables from the header file.
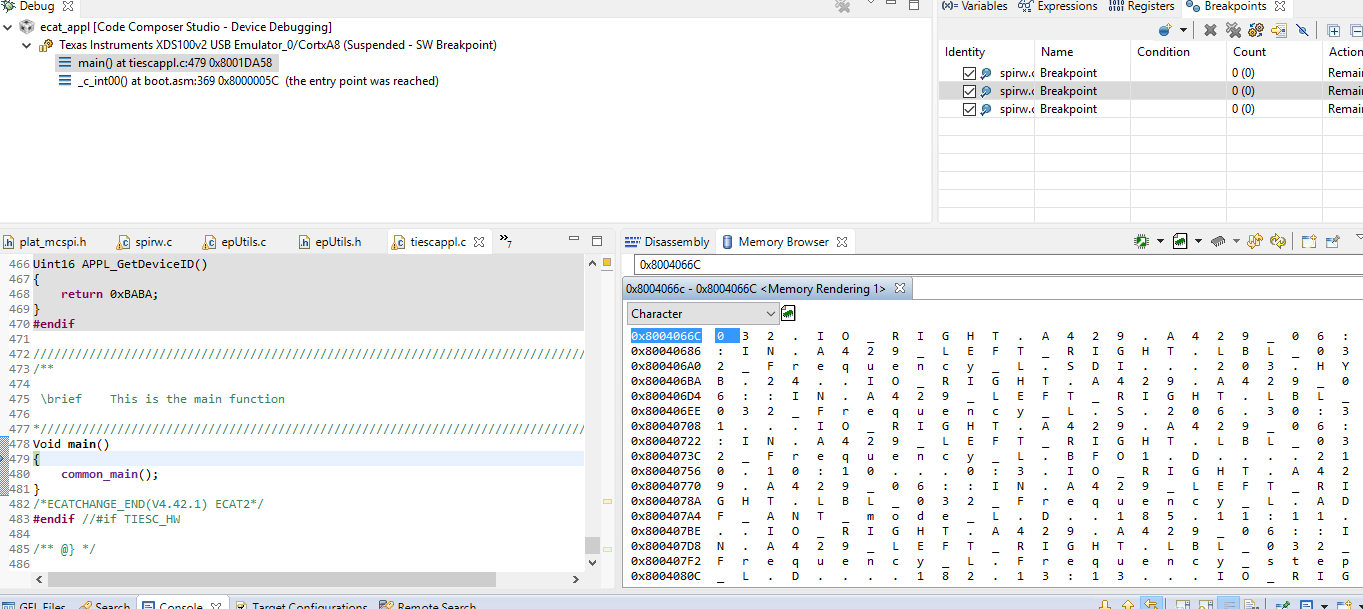
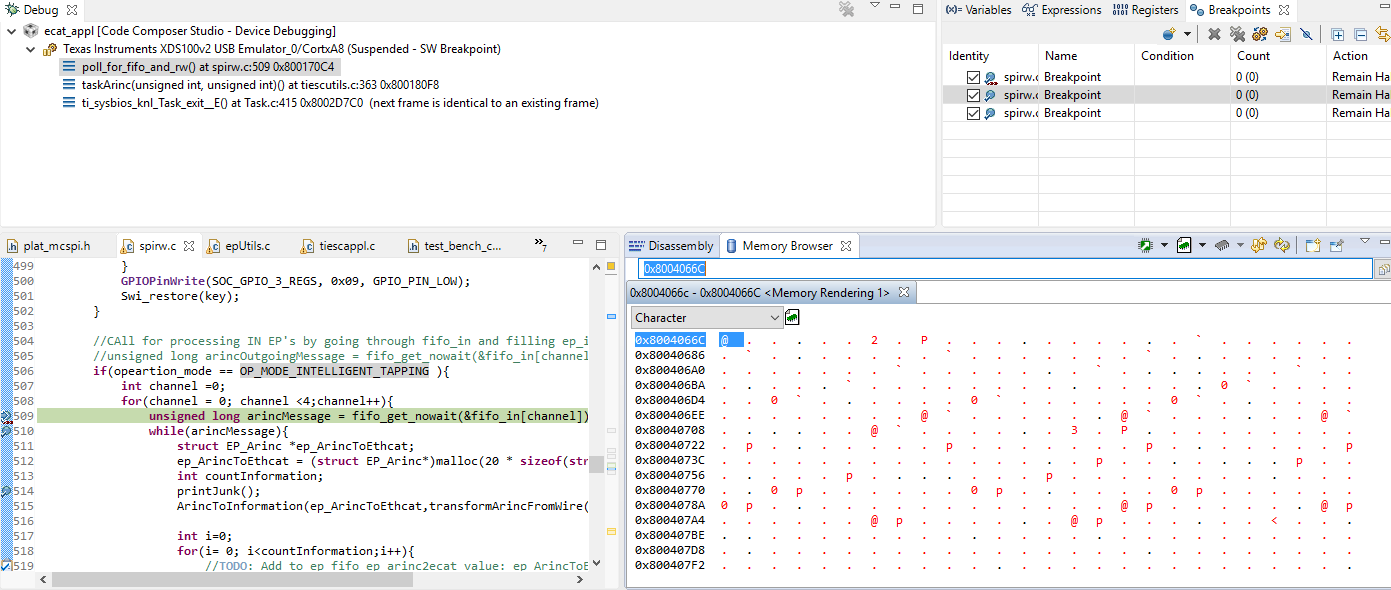
Problem : Some of the values read from the variables are not the same as in the header file but seems to be some kind of a junk. For ex. the symbol "@", "^8DH0L|***" , "ÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿÿ"
From my observation, the values stored in the memory browser itself are wrong and hence the read values are unexpected.
for example,
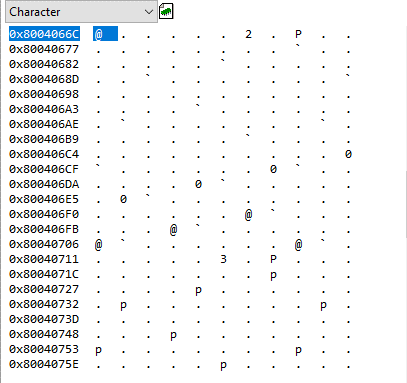
In the header file, value of a variable char * label_id_attr = "032" at one point , but the value in memory browser is "@"
Screenshots for the memory browser:
At another point, the value stored in the variable in a different struct, char * label_id_attr = "0354" and the memory browser has the same value.
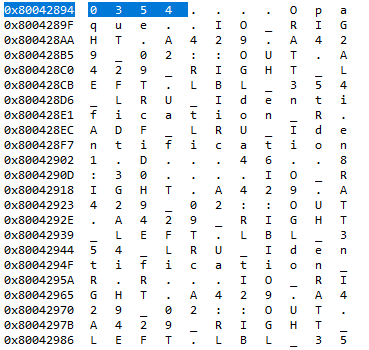
this is weird...
Details which may be needed,
Text file encoding of the header file : UTF-8
CCS version : 6.0.1.00040
compiler version : Tl v5.1.14
Family : ARM Generic CortexA8 Device
Device : TI XDS100v2 USB Emulator_0/Cortex A8
Board : ICE_AM3359 (In target configuration)
Kindly help me solve this issue and let me know if you need any more details.
Thanks,
Bhavanithya