- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.


Tool/software: Code Composer Studio
Greetings,
I am trying to run the tcpEcho example on a custom board which has an Ethernet section the same as the one in the EK-TM4C1294XL development kit.
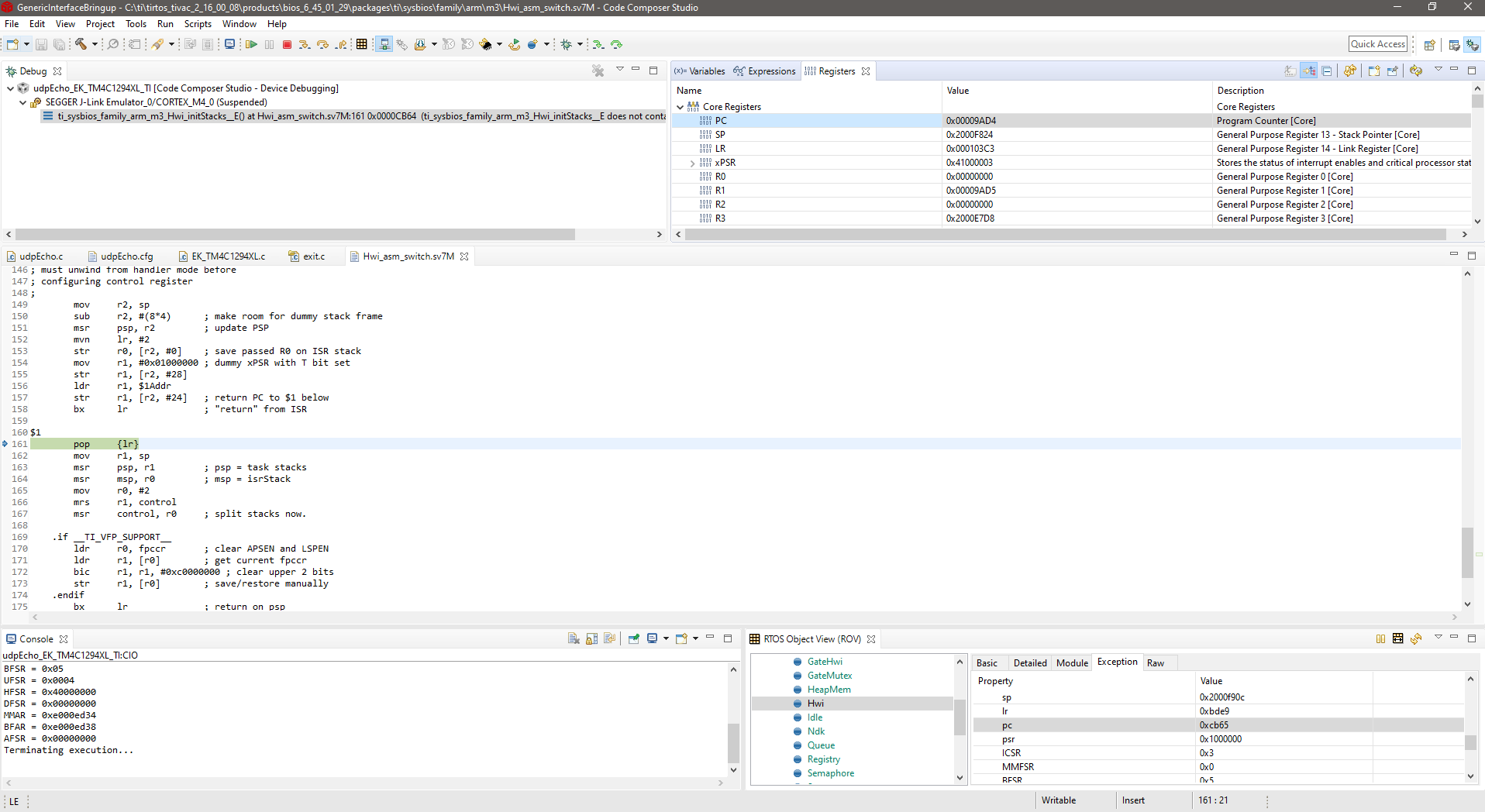
When loading the code (proven to run in the development kit, verifying tools and related equipment) it fails with the following output:
FSR = 0x0004
HFSR = 0x40000000
DFSR = 0x00000000
MMAR = 0xe000ed34
BFAR = 0xe000ed38
AFSR = 0x00000000
Terminating execution...
Tracing execution, the code enters an abnormal termination at Hwi_HwiProxy_switchFromBootStack(); (Hwi.c)
The error is non recoverable.
In order to run with a fixed IP address the following was added to the *.cfg file
Ip.autoIp = false;
Ip.address = "192.168.1.12";
Ip.mask = "255.255.255.0";
Ip.domainName = "mydomain";
Ip.socketMaxConnections = 4;
Ip.socketTimeToLive = 64;
This was confirmed to work with the SDK.
Several of my colleagues have reported the same issue on different projects. It is suspected that there is a configuration issue for the tool.
I would appreciate to be able to speak to an engineer that would help getting passed this issue. Development time is seriously impacted.
Thank you