Other Parts Discussed in Thread: RF430FRL152H, MSP430G2553, , TRF7970A
Tool/software:
Hi
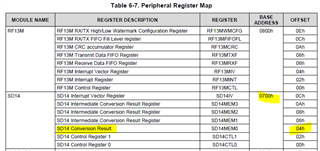
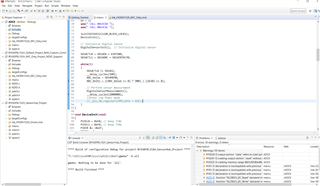
I successfully built the RF430FRL152H SensorHub Project on the RF430FRLHEVM, but I’m having difficulty accessing the ADC0 value. I also need to read data from a digital sensor that communicates via I2C. I used open-source code from DigiKey (link attached below) to successfully retrieve the ADC0 value, but now I’m looking for a way to achieve the same with the digital sensor.
Digikey code (forum.digikey.com/.../12928)