
- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
hi, im using cc3100 boosterpack and msp430f6736 with target board msp-TS430PZ100B
i've downloaded the SDK and ported the host driver implementation to my target board,
i'm trying to run the next program :
int main(void) {
int AP;
WDTCTL = WDTPW | WDTHOLD; // Stop watchdog timer
AP = sl_Start(0,0,0);
return 0;
}
but it gets stuck inside the sl_start function at :
OSI_RET_OK_CHECK(sl_SyncObjWait(&g_pCB->ObjPool[pObjIdx].SyncObj, SL_OS_WAIT_FOREVER));
i've looked for solution but didnt find, what i kknow is that, the function is infinite loop, that will break only if there is interrupt from IRQ,
so i looked at P2 interrupt routine:
#pragma vector=PORT2_VECTOR
__interrupt void IntSpiGPIOHandler(void)
{
switch(__even_in_range(P2IV, P2IV_P2IFG7))
{
case P2IV_P2IFG7:
#ifndef SL_IF_TYPE_UART
if (pIraEventHandler)
{
pIraEventHandler(0);
}
#else
if(puartFlowctrl->bRtsSetByFlowControl == FALSE)
{
clear_rts();
}
#endif
break;
default:
break;
}
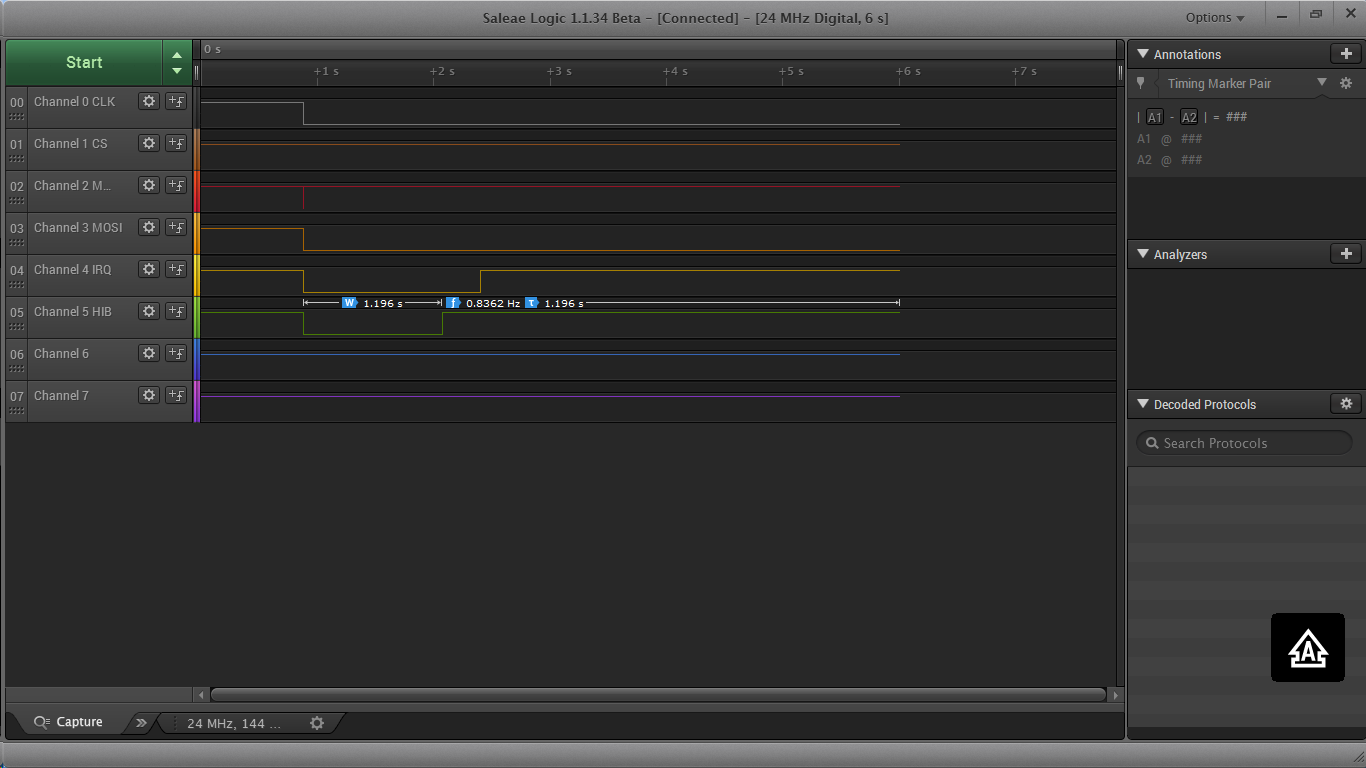
}more over i looked at the register and saw that i actually have an interrrupt at P2.7 = IRQ (P2IV = 0x10, P2IFG=0xFF, P2IE = 0x80 , P2IES = 0)
im adding also a probe on the ports and my spi.c, board.c
why doesnt it work?
/*
* spi.c - msp430f5529 launchpad spi interface implementation
*
* Copyright (C) 2014 Texas Instruments Incorporated - http://www.ti.com/
*
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the
* distribution.
*
* Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
* A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
* OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
* SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
* LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
* DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
* THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
* (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
*/
#ifndef SL_IF_TYPE_UART
#include <msp430f6736.h>
#include "datatypes.h"
#include "simplelink.h"
#include "spi.h"
#include "board.h"
#define ASSERT_CS() (P4OUT &= ~BIT0)
#define DEASSERT_CS() (P4OUT |= BIT0)
int spi_Close(Fd_t fd)
{
/* Disable WLAN Interrupt ... */
CC3100_InterruptDisable();
return 0;
}
Fd_t spi_Open(char *ifName, unsigned long flags)
{
/* Select the SPI lines: MOSI/MISO on P2.3,2 CLK on P2.5 */
// Setup P1.0 output, P1.2 UCA0SOMI, P1.3 UCA0SIMO, P1.6 UCA0CLK
P1OUT &= ~BIT0; // Clear P1.0
P1DIR |= BIT0; // Set P1.0 to output direction
P1SEL |= BIT2 | BIT3 | BIT6; // Set P1.0,P1.2,P1.3,P1.6 to non-IO
// Setup eUSCI_A0
// Setup eUSCI_A0
UCA0CTLW0 |= UCSWRST; // **Put state machine in reset**
UCA0CTLW0 |= UCMST | UCMSB | UCSYNC | UCCKPH; // 3-pin, 8-bit SPI master
// Clock polarity high, MSB
UCA0CTLW0 |= UCSSEL_2; // SMCLK
UCA0BRW_L = 0x01; // /2
UCA0BRW_H = 0; //
UCA0MCTLW = 0; // No modulation
UCA0CTLW0 &= ~UCSWRST; // **Initialize USCI state machine**
UCA0IE = UCRXIE; // Enable USCI_A0 RX,TX interrupt
/* P4.1 -(HIB) WLAN enable full DS */
P4SEL &= ~BIT1;
P4OUT &= ~BIT1;
P4DIR |= BIT1;
/* Configure SPI IRQ line on P2.7 */
P2DIR &= ~BIT7;
P2SEL &= ~BIT7;
P2REN |= BIT7;
/* Configure the SPI CS to be on P4.0 */
P4OUT |= BIT0;
P4SEL &= ~BIT0;
P4DIR |= BIT0;
/* 50 ms delay */
Delay(50);
/* Enable WLAN interrupt */
CC3100_InterruptEnable();
return NONOS_RET_OK;
}
int spi_Write(Fd_t fd, unsigned char *pBuff, int len)
{
int len_to_return = len;
ASSERT_CS();
while (len)
{
while (!(UCA0IFG&UCTXIFG));
UCA0TXBUF = *pBuff;
while (!(UCA0IFG&UCRXIFG));
UCA0RXBUF;
len --;
pBuff++;
}
DEASSERT_CS();
return len_to_return;
}
int spi_Read(Fd_t fd, unsigned char *pBuff, int len)
{
int i = 0;
ASSERT_CS();
for (i = 0; i < len; i ++)
{
while (!(UCA0IFG&UCTXIFG));
UCA0TXBUF = 0xFF;
while (!(UCA0IFG&UCRXIFG));
pBuff[i] = UCA0RXBUF;
}
DEASSERT_CS();
return len;
}
#endif /* SL_IF_TYPE_UART */
/*
* board.c - msp430f5529 launchpad configuration
*
* Copyright (C) 2014 Texas Instruments Incorporated - http://www.ti.com/
*
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the
* distribution.
*
* Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
* A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
* OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
* SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
* LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
* DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
* THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
* (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
*/
#include "simplelink.h"
#include "board.h"
#define XT1_XT2_PORT_SEL P5SEL
#define XT1_ENABLE (BIT4 + BIT5)
#define PMM_STATUS_ERROR 1
#define PMM_STATUS_OK 0
#define XT1HFOFFG 0
P_EVENT_HANDLER pIraEventHandler = 0;
BOOLEAN IntIsMasked;
#ifdef SL_IF_TYPE_UART
#define ASSERT_UART(expr) { if (!(expr)) { while(1) ;}}
unsigned char error_overrun = FALSE;
_uartFlowctrl uartFlowctrl;
_uartFlowctrl *puartFlowctrl = &uartFlowctrl;
#endif
/*!
\brief Increase Vcore by one level
\param[in] level Level to which Vcore needs to be increased
\return status
\note
\warning
*/
static uint16_t SetVCoreUp(uint8_t level)
{
uint16_t PMMRIE_backup, SVSMHCTL_backup, SVSMLCTL_backup;
/*The code flow for increasing the Vcore has been altered to work around
* the erratum FLASH37.
* Please refer to the Errata sheet to know if a specific device is affected
* DO NOT ALTER THIS FUNCTION */
/* Open PMM registers for write access */
PMMCTL0_H = 0xA5;
/* Disable dedicated Interrupts */
/* Backup all registers */
PMMRIE_backup = PMMRIE;
PMMRIE &= ~(SVMHVLRPE | SVSHPE | SVMLVLRPE | SVSLPE | SVMHVLRIE |
SVMHIE | SVSMHDLYIE | SVMLVLRIE | SVMLIE | SVSMLDLYIE );
SVSMHCTL_backup = SVSMHCTL;
SVSMLCTL_backup = SVSMLCTL;
/* Clear flags */
PMMIFG = 0;
/* Set SVM highside to new level and check if a VCore increase is possible */
SVSMHCTL = SVMHE | SVSHE | (SVSMHRRL0 * level);
/* Wait until SVM highside is settled */
while ((PMMIFG & SVSMHDLYIFG) == 0);
/* Clear flag */
PMMIFG &= ~SVSMHDLYIFG;
/* Check if a VCore increase is possible */
if ((PMMIFG & SVMHIFG) == SVMHIFG)
{
/* -> Vcc is too low for a Vcore increase */
/* recover the previous settings */
PMMIFG &= ~SVSMHDLYIFG;
SVSMHCTL = SVSMHCTL_backup;
/* Wait until SVM highside is settled */
while ((PMMIFG & SVSMHDLYIFG) == 0);
/* Clear all Flags */
PMMIFG &= ~(SVMHVLRIFG | SVMHIFG | SVSMHDLYIFG | SVMLVLRIFG | SVMLIFG |
SVSMLDLYIFG);
PMMRIE = PMMRIE_backup; /* Restore PMM interrupt enable register */
PMMCTL0_H = 0x00; /* Lock PMM registers for write access */
return PMM_STATUS_ERROR; /* return: voltage not set */
}
/* Set also SVS highside to new level */
/* Vcc is high enough for a Vcore increase */
SVSMHCTL |= (SVSHRVL0 * level);
/* Wait until SVM highside is settled */
while ((PMMIFG & SVSMHDLYIFG) == 0);
/* Clear flag */
PMMIFG &= ~SVSMHDLYIFG;
/* Set VCore to new level */
PMMCTL0_L = PMMCOREV0 * level;
/* Set SVM, SVS low side to new level */
SVSMLCTL = SVMLE | (SVSMLRRL0 * level) | SVSLE | (SVSLRVL0 * level);
/* Wait until SVM, SVS low side is settled */
while ((PMMIFG & SVSMLDLYIFG) == 0);
/* Clear flag */
PMMIFG &= ~SVSMLDLYIFG;
/*SVS, SVM core and high side are now set to protect for the new core level*/
/* Restore Low side settings */
/* Clear all other bits _except_ level settings */
SVSMLCTL &= (SVSLRVL0+SVSLRVL1+SVSMLRRL0+SVSMLRRL1+SVSMLRRL2);
/* Clear level settings in the backup register,keep all other bits */
SVSMLCTL_backup &= ~(SVSLRVL0+SVSLRVL1+SVSMLRRL0+SVSMLRRL1+SVSMLRRL2);
/* Restore low-side SVS monitor settings */
SVSMLCTL |= SVSMLCTL_backup;
/* Restore High side settings */
/* Clear all other bits except level settings */
SVSMHCTL &= (SVSHRVL0+SVSHRVL1+SVSMHRRL0+SVSMHRRL1+SVSMHRRL2);
/* Clear level settings in the backup register,keep all other bits */
SVSMHCTL_backup &= ~(SVSHRVL0+SVSHRVL1+SVSMHRRL0+SVSMHRRL1+SVSMHRRL2);
/* Restore backup */
SVSMHCTL |= SVSMHCTL_backup;
/* Wait until high side, low side settled */
while (((PMMIFG & SVSMLDLYIFG) == 0) && ((PMMIFG & SVSMHDLYIFG) == 0));
/* Clear all Flags */
PMMIFG &= ~(SVMHVLRIFG | SVMHIFG | SVSMHDLYIFG | SVMLVLRIFG | SVMLIFG
| SVSMLDLYIFG);
PMMRIE = PMMRIE_backup; /* Restore PMM interrupt enable register */
PMMCTL0_H = 0x00; /* Lock PMM registers for write access */
return PMM_STATUS_OK;
}
/*!
\brief Decrease Vcore by one level
\param[in] level Level to which Vcore needs to be decreased
\return status
\note
\warning
*/
static uint16_t SetVCoreDown(uint8_t level)
{
uint16_t PMMRIE_backup, SVSMHCTL_backup, SVSMLCTL_backup;
/* The code flow for decreasing the Vcore has been altered to work around
* the erratum FLASH37.
* Please refer to the Errata sheet to know if a specific device is affected
* DO NOT ALTER THIS FUNCTION */
/* Open PMM registers for write access */
PMMCTL0_H = 0xA5;
/* Disable dedicated Interrupts */
/* Backup all registers */
PMMRIE_backup = PMMRIE;
PMMRIE &= ~(SVMHVLRPE | SVSHPE | SVMLVLRPE | SVSLPE | SVMHVLRIE |
SVMHIE | SVSMHDLYIE | SVMLVLRIE | SVMLIE | SVSMLDLYIE );
SVSMHCTL_backup = SVSMHCTL;
SVSMLCTL_backup = SVSMLCTL;
/* Clear flags */
PMMIFG &= ~(SVMHIFG | SVSMHDLYIFG | SVMLIFG | SVSMLDLYIFG);
/* Set SVM, SVS high & low side to new settings in normal mode */
SVSMHCTL = SVMHE | (SVSMHRRL0 * level) | SVSHE | (SVSHRVL0 * level);
SVSMLCTL = SVMLE | (SVSMLRRL0 * level) | SVSLE | (SVSLRVL0 * level);
/* Wait until SVM high side and SVM low side is settled */
while ((PMMIFG & SVSMHDLYIFG) == 0 || (PMMIFG & SVSMLDLYIFG) == 0);
/* Clear flags */
PMMIFG &= ~(SVSMHDLYIFG + SVSMLDLYIFG);
/*SVS, SVM core and high side are now set to protect for the new core level*/
/* Set VCore to new level */
PMMCTL0_L = PMMCOREV0 * level;
/* Restore Low side settings */
/* Clear all other bits _except_ level settings */
SVSMLCTL &= (SVSLRVL0+SVSLRVL1+SVSMLRRL0+SVSMLRRL1+SVSMLRRL2);
/* Clear level settings in the backup register,keep all other bits */
SVSMLCTL_backup &= ~(SVSLRVL0+SVSLRVL1+SVSMLRRL0+SVSMLRRL1+SVSMLRRL2);
/* Restore low-side SVS monitor settings */
SVSMLCTL |= SVSMLCTL_backup;
/* Restore High side settings */
/* Clear all other bits except level settings */
SVSMHCTL &= (SVSHRVL0+SVSHRVL1+SVSMHRRL0+SVSMHRRL1+SVSMHRRL2);
/* Clear level settings in the backup register, keep all other bits */
SVSMHCTL_backup &= ~(SVSHRVL0+SVSHRVL1+SVSMHRRL0+SVSMHRRL1+SVSMHRRL2);
/* Restore backup */
SVSMHCTL |= SVSMHCTL_backup;
/* Wait until high side, low side settled */
while (((PMMIFG & SVSMLDLYIFG) == 0) && ((PMMIFG & SVSMHDLYIFG) == 0));
/* Clear all Flags */
PMMIFG &= ~(SVMHVLRIFG | SVMHIFG | SVSMHDLYIFG | SVMLVLRIFG | SVMLIFG
| SVSMLDLYIFG);
PMMRIE = PMMRIE_backup; /* Restore PMM interrupt enable register */
PMMCTL0_H = 0x00; /* Lock PMM registers for write access */
return PMM_STATUS_OK; /* Return: OK */
}
uint16_t SetVCore(uint8_t level)
{
uint16_t actlevel;
uint16_t status = 0;
level &= PMMCOREV_3; /* Set Mask for Max. level */
actlevel = (PMMCTL0 & PMMCOREV_3); /* Get actual VCore */
/* step by step increase or decrease */
while (((level != actlevel) && (status == 0)) || (level < actlevel))
{
if (level > actlevel)
{
status = SetVCoreUp(++actlevel);
}
else
{
status = SetVCoreDown(--actlevel);
}
}
return status;
}
void LFXT_Start(uint16_t xtdrive)
{
/*AUX3CHCTL = 0x6913;
AUXADCCTL = 0x0000;*/
/* If the drive setting is not already set to maximum */
/* Set it to max for LFXT startup */
if ((UCSCTL6 & XT1DRIVE_3)!= XT1DRIVE_3)
{
/* Highest drive setting for XT1startup */
UCSCTL6_L |= XT1DRIVE1_L + XT1DRIVE0_L;
}
// Setup LFXT1
UCSCTL6 &= ~(XT1OFF); // XT1 On
UCSCTL6 |= XCAP_3; // Internal load cap
// Loop until XT1 fault flag is cleared
/*
do
{
UCSCTL7 &= ~XT1LFOFFG; // Clear XT1 fault flags
} while (UCSCTL7 & XT1LFOFFG); // Test XT1 fault flag
*/
UCSCTL6 = (UCSCTL6 & ~(XT1DRIVE_3)) | (xtdrive); /*set requested Drive mode */
}
void Init_FLL(uint16_t fsystem, uint16_t ratio)
{
uint16_t d, dco_div_bits;
uint16_t mode = 0;
/*Save actual state of FLL loop control, then disable it. This is needed to
* prevent the FLL from acting as we are making fundamental modifications to
* the clock setup. */
uint16_t srRegisterState = __get_SR_register() & SCG0;
__bic_SR_register(SCG0);
d = ratio;
dco_div_bits = FLLD__2; /* Have at least a divider of 2 */
if (fsystem > 16000)
{
d >>= 1 ;
mode = 1;
}
else
{
fsystem <<= 1; /* fsystem = fsystem * 2 */
}
while (d > 512)
{
dco_div_bits = dco_div_bits + FLLD0; /* Set next higher div level */
d >>= 1;
}
UCSCTL0 = 0x0000; /* Set DCO to lowest Tap */
UCSCTL2 &= ~(0x03FF); /* Reset FN bits */
UCSCTL2 = dco_div_bits | (d - 1);
if (fsystem <= 630) /* fsystem < 0.63MHz */
UCSCTL1 = DCORSEL_0;
else if (fsystem < 1250) /* 0.63MHz < fsystem < 1.25MHz */
UCSCTL1 = DCORSEL_1;
else if (fsystem < 2500) /* 1.25MHz < fsystem < 2.5MHz */
UCSCTL1 = DCORSEL_2;
else if (fsystem < 5000) /* 2.5MHz < fsystem < 5MHz */
UCSCTL1 = DCORSEL_3;
else if (fsystem < 10000) /* 5MHz < fsystem < 10MHz */
UCSCTL1 = DCORSEL_4;
else if (fsystem < 20000) /* 10MHz < fsystem < 20MHz */
UCSCTL1 = DCORSEL_5;
else if (fsystem < 40000) /* 20MHz < fsystem < 40MHz */
UCSCTL1 = DCORSEL_6;
else
UCSCTL1 = DCORSEL_7;
UCSCTL7 &= ~(DCOFFG | XT1LFOFFG);
SFRIFG1 &= ~OFIFG;
if (mode == 1)
{ /* fsystem > 16000 */
SELECT_MCLK_SMCLK(SELM__DCOCLK + SELS__DCOCLK); /* Select DCOCLK */
}
else
{
SELECT_MCLK_SMCLK(SELM__DCOCLKDIV + SELS__DCOCLKDIV);/*Select DCODIVCLK*/
}
__bis_SR_register(srRegisterState); /* Restore previous SCG0 */
}
void Init_FLL_Settle(uint16_t fsystem, uint16_t ratio)
{
volatile uint16_t x = ratio * 32;
Init_FLL(fsystem, ratio);
while (x--)
{
__delay_cycles(30);
}
}
int registerInterruptHandler(P_EVENT_HANDLER InterruptHdl , void* pValue)
{
pIraEventHandler = InterruptHdl;
return 0;
}
void CC3100_disable()
{
P4OUT &= ~BIT1;
}
void CC3100_enable()
{
P4OUT |= BIT1;
}
void CC3100_InterruptEnable(void)
{
P2IES &= ~BIT7;
P2IE |= BIT7;
#ifdef SL_IF_TYPE_UART
UCA0IE |= UCRXIE;
#endif
}
void CC3100_InterruptDisable()
{
P2IE &= ~BIT7;
#ifdef SL_IF_TYPE_UART
UCA0IE &= ~UCRXIE;
#endif
}
void MaskIntHdlr()
{
IntIsMasked = TRUE;
}
void UnMaskIntHdlr()
{
IntIsMasked = FALSE;
}
/*
void set_rts()
{
P1OUT |= BIT4;
}
void clear_rts()
{
P1OUT &= ~BIT4;
}
*/
void initClk()
{
/* Set Vcore to accomodate for max. allowed system speed */
SetVCore(3);
/* Use 32.768kHz XTAL as reference */
LFXT_Start(XT1DRIVE_0);
/* Set system clock to max (25MHz) */
Init_FLL_Settle(25000, 762);
SFRIFG1 = 0;
SFRIE1 |= OFIE;
/* Globally enable interrupts */
__enable_interrupt();
}
void stopWDT()
{
WDTCTL = WDTPW + WDTHOLD;
}
#pragma vector=PORT1_VECTOR
__interrupt void Port1_ISR(void)
{
/* Context save interrupt flag before calling interrupt vector. */
/* Reading interrupt vector generator will automatically clear IFG flag */
switch (__even_in_range(P1IV, P1IV_P1IFG7))
{
/* Vector P1IV_NONE: No Interrupt pending */
case P1IV_NONE:
break;
/* Vector P1IV_P1IFG0: P1IV P1IFG.0 */
case P1IV_P1IFG0:
break;
/* Vector P1IV_P1IFG1: P1IV P1IFG.1 */
case P1IV_P1IFG1:
break;
/* Vector P1IV_P1IFG2: P1IV P1IFG.2 */
case P1IV_P1IFG2:
break;
/* Vector P1IV_P1IFG3: P1IV P1IFG.3 */
case P1IV_P1IFG3:
break;
/* Vector P1IV_P1IFG4: P1IV P1IFG.4 */
case P1IV_P1IFG4:
break;
/* Vector P1IV_P1IFG5: P1IV P1IFG.5 */
case P1IV_P1IFG5:
break;
/* Vector P1IV_P1IFG1: P1IV P1IFG.6 */
case P1IV_P1IFG6:
break;
/* Vector P1IV_P1IFG7: P1IV P1IFG.7 */
case P1IV_P1IFG7:
break;
/* Default case */
default:
break;
}
}
void Delay(unsigned long interval)
{
while(interval > 0)
{
__delay_cycles(25000);
interval--;
}
}
/*!
\brief The IntSpiGPIOHandler interrupt handler
\param[in] none
\return none
\note
\warning
*/
#pragma vector=PORT2_VECTOR
__interrupt void IntSpiGPIOHandler(void)
{
switch(__even_in_range(P2IV, P2IV_P2IFG7))
{
case P2IV_P2IFG7:
#ifndef SL_IF_TYPE_UART
if (pIraEventHandler)
{
pIraEventHandler(0);
}
#else
if(puartFlowctrl->bRtsSetByFlowControl == FALSE)
{
clear_rts();
}
#endif
break;
default:
break;
}
}
/*!
\brief The UART A0 interrupt handler
\param[in] none
\return none
\note
\warning
*/
#pragma vector=USCI_A0_VECTOR
__interrupt void CC3100_UART_ISR(void)
{
switch(__even_in_range(UCA0IV,0x08))
{
case 0:break; /* Vector 0 - no interrupt */
case 2: /* Vector 2 - RXIF */
#ifdef SL_IF_TYPE_UART
{
UINT8 ByteRead;
while((UCA0IFG & UCRXIFG) != 0);
if(UCRXERR & UCA1STAT)
{
if(UCOE & UCA1STAT)
{
error_overrun = TRUE;
}
ASSERT_UART(0);
}
ByteRead = UCA0RXBUF;
if(puartFlowctrl->bActiveBufferIsJitterOne == TRUE)
{
if(puartFlowctrl->JitterBufferFreeBytes > 0)
{
puartFlowctrl->JitterBuffer[puartFlowctrl->JitterBufferWriteIdx] = ByteRead;
puartFlowctrl->JitterBufferFreeBytes--;
puartFlowctrl->JitterBufferWriteIdx++;
if((FALSE == IntIsMasked) && (NULL != pIraEventHandler))
{
pIraEventHandler(0);
}
}
else
{
if(P1OUT & BIT3)
{
ASSERT_UART(0);
}
}
if(puartFlowctrl->JitterBufferFreeBytes <= UART_READ_JITTER_RTS_GUARD)
{
set_rts();
puartFlowctrl->bRtsSetByFlowControl = TRUE;
}
if(puartFlowctrl->JitterBufferWriteIdx > (UART_READ_JITTER_BUFFER_SIZE - 1))
{
puartFlowctrl->JitterBufferWriteIdx = 0;
}
}
else
{
puartFlowctrl->pActiveBuffer[puartFlowctrl->ActiveBufferWriteCounter++] = ByteRead;
}
}
#endif
break;
case 4:break; /* Vector 4 - TXIFG */
default: break;
}
}

hi
SL_IF_TYPE_UART is not defined in pre-symbol list, also i looked to see maybe it was defined at libarary but its not,
the implementation of sl_IfRegIntHdlr
int registerInterruptHandler(P_EVENT_HANDLER InterruptHdl , void* pValue)
{
pIraEventHandler = InterruptHdl;
return 0;
}
opened pIraEventHandler :P_EVENT_HANDLER pIraEventHandler = 0;
and the definition of P_EVENT_HANDLER :
typedef void (*P_EVENT_HANDLER)(void* pValue);
i did put a break point in the IntSpiGPIOHandler before i was posting, the program dont gets there
im adding the sl_start implementation :
#if _SL_INCLUDE_FUNC(sl_Start)
int sl_Start(const void* pIfHdl, char* pDevName, const P_INIT_CALLBACK pInitCallBack)
{
int pObjIdx = MAX_CONCURRENT_ACTIONS;
InitComplete_t AsyncRsp;
/* callback init */
_SlDrvDriverCBInit();
/* open the interface: usually SPI or UART */
if (NULL == pIfHdl)
{
g_pCB->FD = sl_IfOpen(pDevName, 0);
}
else
{
g_pCB->FD = (_SlFd_t)pIfHdl;
}
/* Use Obj to issue the command, if not available try later */
pObjIdx = _SlDrvWaitForPoolObj(START_STOP_ID,SL_MAX_SOCKETS);
if (MAX_CONCURRENT_ACTIONS == pObjIdx)
{
return SL_POOL_IS_EMPTY;
}
OSI_RET_OK_CHECK(sl_LockObjLock(&g_pCB->ProtectionLockObj, SL_OS_WAIT_FOREVER));
g_pCB->ObjPool[pObjIdx].pRespArgs = (UINT8 *)&AsyncRsp;
OSI_RET_OK_CHECK(sl_LockObjUnlock(&g_pCB->ProtectionLockObj));
if( g_pCB->FD >= 0)
{
sl_DeviceDisable();
sl_IfRegIntHdlr((SL_P_EVENT_HANDLER)_SlDrvRxIrqHandler, NULL);
sl_DeviceEnable();
if (NULL != pInitCallBack)
{
g_pCB->pInitCallback = pInitCallBack;
}
else
{
OSI_RET_OK_CHECK(sl_SyncObjWait(&g_pCB->ObjPool[pObjIdx].SyncObj, SL_OS_WAIT_FOREVER));
/*release Pool Object*/
_SlDrvReleasePoolObj(g_pCB->FunctionParams.AsyncExt.ActionIndex);
return GetStartResponseConvert(AsyncRsp.Status);
}
}
return (int)g_pCB->FD;
}the program stucks there
the IRQ handler:
/*****************************************************************************
_SlDrvRxIrqHandler
*****************************************************************************/
void _SlDrvRxIrqHandler(void *pValue)
{
sl_IfMaskIntHdlr();
g_pCB->RxIrqCnt++;
if (TRUE == g_pCB->IsCmdRespWaited)
{
OSI_RET_OK_CHECK( sl_SyncObjSignalFromIRQ(&g_pCB->CmdSyncObj) );
}
else
{
sl_Spawn((_SlSpawnEntryFunc_t)_SlDrvMsgReadSpawnCtx, NULL, 0);
}
}
more over i add the board.c and spi.c
/*
* spi.c - msp430f5529 launchpad spi interface implementation
*
* Copyright (C) 2014 Texas Instruments Incorporated - http://www.ti.com/
*
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the
* distribution.
*
* Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
* A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
* OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
* SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
* LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
* DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
* THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
* (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
*/
#ifndef SL_IF_TYPE_UART
#include <msp430f6736.h>
#include "datatypes.h"
#include "simplelink.h"
#include "spi.h"
#include "board.h"
#define ASSERT_CS() (P4OUT &= ~BIT0)
#define DEASSERT_CS() (P4OUT |= BIT0)
int spi_Close(Fd_t fd)
{
/* Disable WLAN Interrupt ... */
CC3100_InterruptDisable();
return 0;
}
Fd_t spi_Open(char *ifName, unsigned long flags)
{
/* Select the SPI lines: MOSI/MISO on P2.3,2 CLK on P2.5 */
// Setup P1.0 output, P1.2 UCA0SOMI, P1.3 UCA0SIMO, P1.6 UCA0CLK
P1OUT &= ~BIT0; // Clear P1.0
P1DIR |= BIT0; // Set P1.0 to output direction
P1SEL |= BIT2 | BIT3 | BIT6; // Set P1.0,P1.2,P1.3,P1.6 to non-IO
// Setup eUSCI_A0
// Setup eUSCI_A0
UCA0CTLW0 |= UCSWRST; // **Put state machine in reset**
UCA0CTLW0 |= UCMST | UCMSB | UCSYNC | UCCKPH; // 3-pin, 8-bit SPI master
// Clock polarity high, MSB
UCA0CTLW0 |= UCSSEL_2; // SMCLK
UCA0BRW_L = 0x01; // /2
UCA0BRW_H = 0; //
UCA0MCTLW = 0; // No modulation
UCA0CTLW0 &= ~UCSWRST; // **Initialize USCI state machine**
UCA0IE = UCRXIE; // Enable USCI_A0 RX,TX interrupt
/* P4.1 -(HIB) WLAN enable full DS */
P4SEL &= ~BIT1;
P4OUT &= ~BIT1;
P4DIR |= BIT1;
/* Configure SPI IRQ line on P2.7 */
P2DIR &= ~BIT7;
P2SEL &= ~BIT7;
P2REN |= BIT7;
/* Configure the SPI CS to be on P4.0 */
P4OUT |= BIT0;
P4SEL &= ~BIT0;
P4DIR |= BIT0;
/* 50 ms delay */
Delay(50);
/* Enable WLAN interrupt */
CC3100_InterruptEnable();
return NONOS_RET_OK;
}
int spi_Write(Fd_t fd, unsigned char *pBuff, int len)
{
int len_to_return = len;
ASSERT_CS();
while (len)
{
while (!(UCA0IFG&UCTXIFG));
UCA0TXBUF = *pBuff;
while (!(UCA0IFG&UCRXIFG));
UCA0RXBUF;
len --;
pBuff++;
}
DEASSERT_CS();
return len_to_return;
}
int spi_Read(Fd_t fd, unsigned char *pBuff, int len)
{
int i = 0;
ASSERT_CS();
for (i = 0; i < len; i ++)
{
while (!(UCA0IFG&UCTXIFG));
UCA0TXBUF = 0xFF;
while (!(UCA0IFG&UCRXIFG));
pBuff[i] = UCA0RXBUF;
}
DEASSERT_CS();
return len;
}
#endif /* SL_IF_TYPE_UART */
/*
* board.c - msp430f5529 launchpad configuration
*
* Copyright (C) 2014 Texas Instruments Incorporated - http://www.ti.com/
*
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the
* distribution.
*
* Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
* A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
* OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
* SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
* LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
* DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
* THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
* (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
*/
#include "simplelink.h"
#include "board.h"
#define XT1_XT2_PORT_SEL P5SEL
#define XT1_ENABLE (BIT4 + BIT5)
#define PMM_STATUS_ERROR 1
#define PMM_STATUS_OK 0
#define XT1HFOFFG 0
P_EVENT_HANDLER pIraEventHandler = 0;
BOOLEAN IntIsMasked;
#ifdef SL_IF_TYPE_UART
#define ASSERT_UART(expr) { if (!(expr)) { while(1) ;}}
unsigned char error_overrun = FALSE;
_uartFlowctrl uartFlowctrl;
_uartFlowctrl *puartFlowctrl = &uartFlowctrl;
#endif
/*!
\brief Increase Vcore by one level
\param[in] level Level to which Vcore needs to be increased
\return status
\note
\warning
*/
static uint16_t SetVCoreUp(uint8_t level)
{
uint16_t PMMRIE_backup, SVSMHCTL_backup, SVSMLCTL_backup;
/*The code flow for increasing the Vcore has been altered to work around
* the erratum FLASH37.
* Please refer to the Errata sheet to know if a specific device is affected
* DO NOT ALTER THIS FUNCTION */
/* Open PMM registers for write access */
PMMCTL0_H = 0xA5;
/* Disable dedicated Interrupts */
/* Backup all registers */
PMMRIE_backup = PMMRIE;
PMMRIE &= ~(SVMHVLRPE | SVSHPE | SVMLVLRPE | SVSLPE | SVMHVLRIE |
SVMHIE | SVSMHDLYIE | SVMLVLRIE | SVMLIE | SVSMLDLYIE );
SVSMHCTL_backup = SVSMHCTL;
SVSMLCTL_backup = SVSMLCTL;
/* Clear flags */
PMMIFG = 0;
/* Set SVM highside to new level and check if a VCore increase is possible */
SVSMHCTL = SVMHE | SVSHE | (SVSMHRRL0 * level);
/* Wait until SVM highside is settled */
while ((PMMIFG & SVSMHDLYIFG) == 0);
/* Clear flag */
PMMIFG &= ~SVSMHDLYIFG;
/* Check if a VCore increase is possible */
if ((PMMIFG & SVMHIFG) == SVMHIFG)
{
/* -> Vcc is too low for a Vcore increase */
/* recover the previous settings */
PMMIFG &= ~SVSMHDLYIFG;
SVSMHCTL = SVSMHCTL_backup;
/* Wait until SVM highside is settled */
while ((PMMIFG & SVSMHDLYIFG) == 0);
/* Clear all Flags */
PMMIFG &= ~(SVMHVLRIFG | SVMHIFG | SVSMHDLYIFG | SVMLVLRIFG | SVMLIFG |
SVSMLDLYIFG);
PMMRIE = PMMRIE_backup; /* Restore PMM interrupt enable register */
PMMCTL0_H = 0x00; /* Lock PMM registers for write access */
return PMM_STATUS_ERROR; /* return: voltage not set */
}
/* Set also SVS highside to new level */
/* Vcc is high enough for a Vcore increase */
SVSMHCTL |= (SVSHRVL0 * level);
/* Wait until SVM highside is settled */
while ((PMMIFG & SVSMHDLYIFG) == 0);
/* Clear flag */
PMMIFG &= ~SVSMHDLYIFG;
/* Set VCore to new level */
PMMCTL0_L = PMMCOREV0 * level;
/* Set SVM, SVS low side to new level */
SVSMLCTL = SVMLE | (SVSMLRRL0 * level) | SVSLE | (SVSLRVL0 * level);
/* Wait until SVM, SVS low side is settled */
while ((PMMIFG & SVSMLDLYIFG) == 0);
/* Clear flag */
PMMIFG &= ~SVSMLDLYIFG;
/*SVS, SVM core and high side are now set to protect for the new core level*/
/* Restore Low side settings */
/* Clear all other bits _except_ level settings */
SVSMLCTL &= (SVSLRVL0+SVSLRVL1+SVSMLRRL0+SVSMLRRL1+SVSMLRRL2);
/* Clear level settings in the backup register,keep all other bits */
SVSMLCTL_backup &= ~(SVSLRVL0+SVSLRVL1+SVSMLRRL0+SVSMLRRL1+SVSMLRRL2);
/* Restore low-side SVS monitor settings */
SVSMLCTL |= SVSMLCTL_backup;
/* Restore High side settings */
/* Clear all other bits except level settings */
SVSMHCTL &= (SVSHRVL0+SVSHRVL1+SVSMHRRL0+SVSMHRRL1+SVSMHRRL2);
/* Clear level settings in the backup register,keep all other bits */
SVSMHCTL_backup &= ~(SVSHRVL0+SVSHRVL1+SVSMHRRL0+SVSMHRRL1+SVSMHRRL2);
/* Restore backup */
SVSMHCTL |= SVSMHCTL_backup;
/* Wait until high side, low side settled */
while (((PMMIFG & SVSMLDLYIFG) == 0) && ((PMMIFG & SVSMHDLYIFG) == 0));
/* Clear all Flags */
PMMIFG &= ~(SVMHVLRIFG | SVMHIFG | SVSMHDLYIFG | SVMLVLRIFG | SVMLIFG
| SVSMLDLYIFG);
PMMRIE = PMMRIE_backup; /* Restore PMM interrupt enable register */
PMMCTL0_H = 0x00; /* Lock PMM registers for write access */
return PMM_STATUS_OK;
}
/*!
\brief Decrease Vcore by one level
\param[in] level Level to which Vcore needs to be decreased
\return status
\note
\warning
*/
static uint16_t SetVCoreDown(uint8_t level)
{
uint16_t PMMRIE_backup, SVSMHCTL_backup, SVSMLCTL_backup;
/* The code flow for decreasing the Vcore has been altered to work around
* the erratum FLASH37.
* Please refer to the Errata sheet to know if a specific device is affected
* DO NOT ALTER THIS FUNCTION */
/* Open PMM registers for write access */
PMMCTL0_H = 0xA5;
/* Disable dedicated Interrupts */
/* Backup all registers */
PMMRIE_backup = PMMRIE;
PMMRIE &= ~(SVMHVLRPE | SVSHPE | SVMLVLRPE | SVSLPE | SVMHVLRIE |
SVMHIE | SVSMHDLYIE | SVMLVLRIE | SVMLIE | SVSMLDLYIE );
SVSMHCTL_backup = SVSMHCTL;
SVSMLCTL_backup = SVSMLCTL;
/* Clear flags */
PMMIFG &= ~(SVMHIFG | SVSMHDLYIFG | SVMLIFG | SVSMLDLYIFG);
/* Set SVM, SVS high & low side to new settings in normal mode */
SVSMHCTL = SVMHE | (SVSMHRRL0 * level) | SVSHE | (SVSHRVL0 * level);
SVSMLCTL = SVMLE | (SVSMLRRL0 * level) | SVSLE | (SVSLRVL0 * level);
/* Wait until SVM high side and SVM low side is settled */
while ((PMMIFG & SVSMHDLYIFG) == 0 || (PMMIFG & SVSMLDLYIFG) == 0);
/* Clear flags */
PMMIFG &= ~(SVSMHDLYIFG + SVSMLDLYIFG);
/*SVS, SVM core and high side are now set to protect for the new core level*/
/* Set VCore to new level */
PMMCTL0_L = PMMCOREV0 * level;
/* Restore Low side settings */
/* Clear all other bits _except_ level settings */
SVSMLCTL &= (SVSLRVL0+SVSLRVL1+SVSMLRRL0+SVSMLRRL1+SVSMLRRL2);
/* Clear level settings in the backup register,keep all other bits */
SVSMLCTL_backup &= ~(SVSLRVL0+SVSLRVL1+SVSMLRRL0+SVSMLRRL1+SVSMLRRL2);
/* Restore low-side SVS monitor settings */
SVSMLCTL |= SVSMLCTL_backup;
/* Restore High side settings */
/* Clear all other bits except level settings */
SVSMHCTL &= (SVSHRVL0+SVSHRVL1+SVSMHRRL0+SVSMHRRL1+SVSMHRRL2);
/* Clear level settings in the backup register, keep all other bits */
SVSMHCTL_backup &= ~(SVSHRVL0+SVSHRVL1+SVSMHRRL0+SVSMHRRL1+SVSMHRRL2);
/* Restore backup */
SVSMHCTL |= SVSMHCTL_backup;
/* Wait until high side, low side settled */
while (((PMMIFG & SVSMLDLYIFG) == 0) && ((PMMIFG & SVSMHDLYIFG) == 0));
/* Clear all Flags */
PMMIFG &= ~(SVMHVLRIFG | SVMHIFG | SVSMHDLYIFG | SVMLVLRIFG | SVMLIFG
| SVSMLDLYIFG);
PMMRIE = PMMRIE_backup; /* Restore PMM interrupt enable register */
PMMCTL0_H = 0x00; /* Lock PMM registers for write access */
return PMM_STATUS_OK; /* Return: OK */
}
uint16_t SetVCore(uint8_t level)
{
uint16_t actlevel;
uint16_t status = 0;
level &= PMMCOREV_3; /* Set Mask for Max. level */
actlevel = (PMMCTL0 & PMMCOREV_3); /* Get actual VCore */
/* step by step increase or decrease */
while (((level != actlevel) && (status == 0)) || (level < actlevel))
{
if (level > actlevel)
{
status = SetVCoreUp(++actlevel);
}
else
{
status = SetVCoreDown(--actlevel);
}
}
return status;
}
void LFXT_Start(uint16_t xtdrive)
{
/*AUX3CHCTL = 0x6913;
AUXADCCTL = 0x0000;*/
/* If the drive setting is not already set to maximum */
/* Set it to max for LFXT startup */
if ((UCSCTL6 & XT1DRIVE_3)!= XT1DRIVE_3)
{
/* Highest drive setting for XT1startup */
UCSCTL6_L |= XT1DRIVE1_L + XT1DRIVE0_L;
}
// Setup LFXT1
UCSCTL6 &= ~(XT1OFF); // XT1 On
UCSCTL6 |= XCAP_3; // Internal load cap
// Loop until XT1 fault flag is cleared
/*
do
{
UCSCTL7 &= ~XT1LFOFFG; // Clear XT1 fault flags
} while (UCSCTL7 & XT1LFOFFG); // Test XT1 fault flag
*/
UCSCTL6 = (UCSCTL6 & ~(XT1DRIVE_3)) | (xtdrive); /*set requested Drive mode */
}
void Init_FLL(uint16_t fsystem, uint16_t ratio)
{
uint16_t d, dco_div_bits;
uint16_t mode = 0;
/*Save actual state of FLL loop control, then disable it. This is needed to
* prevent the FLL from acting as we are making fundamental modifications to
* the clock setup. */
uint16_t srRegisterState = __get_SR_register() & SCG0;
__bic_SR_register(SCG0);
d = ratio;
dco_div_bits = FLLD__2; /* Have at least a divider of 2 */
if (fsystem > 16000)
{
d >>= 1 ;
mode = 1;
}
else
{
fsystem <<= 1; /* fsystem = fsystem * 2 */
}
while (d > 512)
{
dco_div_bits = dco_div_bits + FLLD0; /* Set next higher div level */
d >>= 1;
}
UCSCTL0 = 0x0000; /* Set DCO to lowest Tap */
UCSCTL2 &= ~(0x03FF); /* Reset FN bits */
UCSCTL2 = dco_div_bits | (d - 1);
if (fsystem <= 630) /* fsystem < 0.63MHz */
UCSCTL1 = DCORSEL_0;
else if (fsystem < 1250) /* 0.63MHz < fsystem < 1.25MHz */
UCSCTL1 = DCORSEL_1;
else if (fsystem < 2500) /* 1.25MHz < fsystem < 2.5MHz */
UCSCTL1 = DCORSEL_2;
else if (fsystem < 5000) /* 2.5MHz < fsystem < 5MHz */
UCSCTL1 = DCORSEL_3;
else if (fsystem < 10000) /* 5MHz < fsystem < 10MHz */
UCSCTL1 = DCORSEL_4;
else if (fsystem < 20000) /* 10MHz < fsystem < 20MHz */
UCSCTL1 = DCORSEL_5;
else if (fsystem < 40000) /* 20MHz < fsystem < 40MHz */
UCSCTL1 = DCORSEL_6;
else
UCSCTL1 = DCORSEL_7;
UCSCTL7 &= ~(DCOFFG | XT1LFOFFG);
SFRIFG1 &= ~OFIFG;
if (mode == 1)
{ /* fsystem > 16000 */
SELECT_MCLK_SMCLK(SELM__DCOCLK + SELS__DCOCLK); /* Select DCOCLK */
}
else
{
SELECT_MCLK_SMCLK(SELM__DCOCLKDIV + SELS__DCOCLKDIV);/*Select DCODIVCLK*/
}
__bis_SR_register(srRegisterState); /* Restore previous SCG0 */
}
void Init_FLL_Settle(uint16_t fsystem, uint16_t ratio)
{
volatile uint16_t x = ratio * 32;
Init_FLL(fsystem, ratio);
while (x--)
{
__delay_cycles(30);
}
}
int registerInterruptHandler(P_EVENT_HANDLER InterruptHdl , void* pValue)
{
pIraEventHandler = InterruptHdl;
return 0;
}
void CC3100_disable()
{
P4OUT &= ~BIT1;
}
void CC3100_enable()
{
P4OUT |= BIT1;
}
void CC3100_InterruptEnable(void)
{
P2IES &= ~BIT7;
P2IE |= BIT7;
#ifdef SL_IF_TYPE_UART
UCA0IE |= UCRXIE;
#endif
}
void CC3100_InterruptDisable()
{
P2IE &= ~BIT7;
#ifdef SL_IF_TYPE_UART
UCA0IE &= ~UCRXIE;
#endif
}
void MaskIntHdlr()
{
IntIsMasked = TRUE;
}
void UnMaskIntHdlr()
{
IntIsMasked = FALSE;
}
/*
void set_rts()
{
P1OUT |= BIT4;
}
void clear_rts()
{
P1OUT &= ~BIT4;
}
*/
void initClk()
{
/* Set Vcore to accomodate for max. allowed system speed */
SetVCore(3);
/* Use 32.768kHz XTAL as reference */
LFXT_Start(XT1DRIVE_0);
/* Set system clock to max (25MHz) */
Init_FLL_Settle(25000, 762);
SFRIFG1 = 0;
SFRIE1 |= OFIE;
/* Globally enable interrupts */
__enable_interrupt();
}
void stopWDT()
{
WDTCTL = WDTPW + WDTHOLD;
}
#pragma vector=PORT1_VECTOR
__interrupt void Port1_ISR(void)
{
/* Context save interrupt flag before calling interrupt vector. */
/* Reading interrupt vector generator will automatically clear IFG flag */
switch (__even_in_range(P1IV, P1IV_P1IFG7))
{
/* Vector P1IV_NONE: No Interrupt pending */
case P1IV_NONE:
break;
/* Vector P1IV_P1IFG0: P1IV P1IFG.0 */
case P1IV_P1IFG0:
break;
/* Vector P1IV_P1IFG1: P1IV P1IFG.1 */
case P1IV_P1IFG1:
break;
/* Vector P1IV_P1IFG2: P1IV P1IFG.2 */
case P1IV_P1IFG2:
break;
/* Vector P1IV_P1IFG3: P1IV P1IFG.3 */
case P1IV_P1IFG3:
break;
/* Vector P1IV_P1IFG4: P1IV P1IFG.4 */
case P1IV_P1IFG4:
break;
/* Vector P1IV_P1IFG5: P1IV P1IFG.5 */
case P1IV_P1IFG5:
break;
/* Vector P1IV_P1IFG1: P1IV P1IFG.6 */
case P1IV_P1IFG6:
break;
/* Vector P1IV_P1IFG7: P1IV P1IFG.7 */
case P1IV_P1IFG7:
break;
/* Default case */
default:
break;
}
}
void Delay(unsigned long interval)
{
while(interval > 0)
{
__delay_cycles(25000);
interval--;
}
}
/*!
\brief The IntSpiGPIOHandler interrupt handler
\param[in] none
\return none
\note
\warning
*/
#pragma vector=PORT2_VECTOR
__interrupt void IntSpiGPIOHandler(void)
{
switch(__even_in_range(P2IV, P2IV_P2IFG7))
{
case P2IV_P2IFG7:
#ifndef SL_IF_TYPE_UART
if (pIraEventHandler)
{
pIraEventHandler(0);
}
#else
if(puartFlowctrl->bRtsSetByFlowControl == FALSE)
{
clear_rts();
}
#endif
break;
default:
break;
}
}
/*!
\brief The UART A0 interrupt handler
\param[in] none
\return none
\note
\warning
*/
#pragma vector=USCI_A0_VECTOR
__interrupt void CC3100_UART_ISR(void)
{
switch(__even_in_range(UCA0IV,0x08))
{
case 0:break; /* Vector 0 - no interrupt */
case 2: /* Vector 2 - RXIF */
#ifdef SL_IF_TYPE_UART
{
UINT8 ByteRead;
while((UCA0IFG & UCRXIFG) != 0);
if(UCRXERR & UCA1STAT)
{
if(UCOE & UCA1STAT)
{
error_overrun = TRUE;
}
ASSERT_UART(0);
}
ByteRead = UCA0RXBUF;
if(puartFlowctrl->bActiveBufferIsJitterOne == TRUE)
{
if(puartFlowctrl->JitterBufferFreeBytes > 0)
{
puartFlowctrl->JitterBuffer[puartFlowctrl->JitterBufferWriteIdx] = ByteRead;
puartFlowctrl->JitterBufferFreeBytes--;
puartFlowctrl->JitterBufferWriteIdx++;
if((FALSE == IntIsMasked) && (NULL != pIraEventHandler))
{
pIraEventHandler(0);
}
}
else
{
if(P1OUT & BIT3)
{
ASSERT_UART(0);
}
}
if(puartFlowctrl->JitterBufferFreeBytes <= UART_READ_JITTER_RTS_GUARD)
{
set_rts();
puartFlowctrl->bRtsSetByFlowControl = TRUE;
}
if(puartFlowctrl->JitterBufferWriteIdx > (UART_READ_JITTER_BUFFER_SIZE - 1))
{
puartFlowctrl->JitterBufferWriteIdx = 0;
}
}
else
{
puartFlowctrl->pActiveBuffer[puartFlowctrl->ActiveBufferWriteCounter++] = ByteRead;
}
}
#endif
break;
case 4:break; /* Vector 4 - TXIFG */
default: break;
}
}
Hi Ankur,
Yogev and I are trying for a while now to get this boosterpack working, but with no success.
I decided to read about the CC3100 from scratch and encountered this lines:
" During initialization, nHIB pin is asserted (to enable the device), while the nRESET pin is kept high. At this stage, HOST_IRQ pin should be driven low by the device until initialization is complete. During this time, and until HOST_IRQ is asserted for the first time, the host must not communicate with the device otherwise the communication with the device might not be established."
source:
http://processors.wiki.ti.com/index.php/CC31xx_Host_Interface
do we need to drive low the IRQ pin before we initiate with sl_start?
Thanks for your help so far,
Hadar
I'm none the wiser from this thread. What exactly is the solution? I have the same problem with all of the getting_starteds - it just stops dead at the bit: marked HERE below
if( g_pCB->FD >= (_SlFd_t)0)
{
sl_DeviceDisable();
HERE-> sl_IfRegIntHdlr((SL_P_EVENT_HANDLER)_SlDrvRxIrqHandler, NULL); <-HERE
g_pCB->pInitCallback = pInitCallBack;
sl_DeviceEnable();
.... etcPlease excuse my lack of understanding. This is because I'm just getting started with these getting started examples and it's a bit difficult to get started with them if they don't work.




