



Part Number: CC2530
Hello,
This is my first SPI connection and I have a trouble with my code. I can send and read data from the accelerometer adxl345, when a try to read the register 0x00, i expected 0xE5 but i receive 0xF2, i am using spi 4 wire connection, the SCLK work fine but i can't read correctly. I am using the below code:
#include "spi.h"
/**************************************************************************************************
* MACROS
**************************************************************************************************/
#define XNV_SPI_BEGIN() st(P1_3 = 0;)
#define XNV_SPI_TX(x) st(U1CSR &= ~0x02; U1DBUF = (x);)
#define XNV_SPI_RX() U1DBUF
#define XNV_SPI_WAIT_RXRDY() st(while (!(U1CSR & 0x02));)
#define XNV_SPI_END() st(P1_3 = 1;)
// The TI reference design uses UART1 Alt. 2 in SPI mode.
#define XNV_SPI_INIT() \
st( \
/* Mode select UART1 SPI Mode as master. */\
U1CSR = 0; \
\
/* Setup for 115200 baud. */\
U1GCR = 11; \
U1BAUD = 216; \
\
/* Set bit order to MSB */\
U1GCR |= BV(5); \
\
/* Set UART1 I/O to alternate 2 location on P1 pins. */\
PERCFG |= 0x02; /* U1CFG */\
\
/* Select peripheral function on I/O pins but SS is left as GPIO for separate control. */\
P1SEL |= 0xE0; /* SELP1_[7:4] */\
/* P1.1,2,3: reset, LCD CS, XNV CS. */\
P1SEL &= ~0x0E; \
P1 |= 0x0E; \
P1_1 = 0; \
P1DIR |= 0x0E; \
\
/* Give UART1 priority over Timer3. */\
P2SEL &= ~0x20; /* PRI2P1 */\
\
/* When SPI config is complete, enable it. */\
U1CSR |= 0x40; \
/* Release XNV reset. */\
P1_1 = 1; \
)
void halMasterSpiInit(void)
{
XNV_SPI_INIT();
}// halMasterSpiInit
uint8 higherbyte;
uint8 lowerbyte;
uint8 spiRead(uint8 addr)
{
uint8 data = 0;
XNV_SPI_BEGIN(); // begin transmission
XNV_SPI_TX(addr); // send addr
for(uint8 i = 0; i < 4 ; i++) {
XNV_SPI_WAIT_RXRDY(); //wait till received byte is ready
higherbyte = XNV_SPI_RX(); // copy received byte
XNV_SPI_WAIT_RXRDY(); //wait till received byte is ready
lowerbyte = XNV_SPI_RX(); // copy received byte
}
XNV_SPI_END(); // End transmission
data = higherbyte;
return (data);
}
// Transmit code
void spiWrite(uint8 addr,uint8 higherbyte/*![0], uint8 lowerbyte*/)
{
XNV_SPI_BEGIN(); // begin transmission
XNV_SPI_TX(addr); // send addr
XNV_SPI_TX(higherbyte); //send higher byte
//![0]XNV_SPI_TX(lowerbyte); //send lower byte
XNV_SPI_END(); // End transmission
}
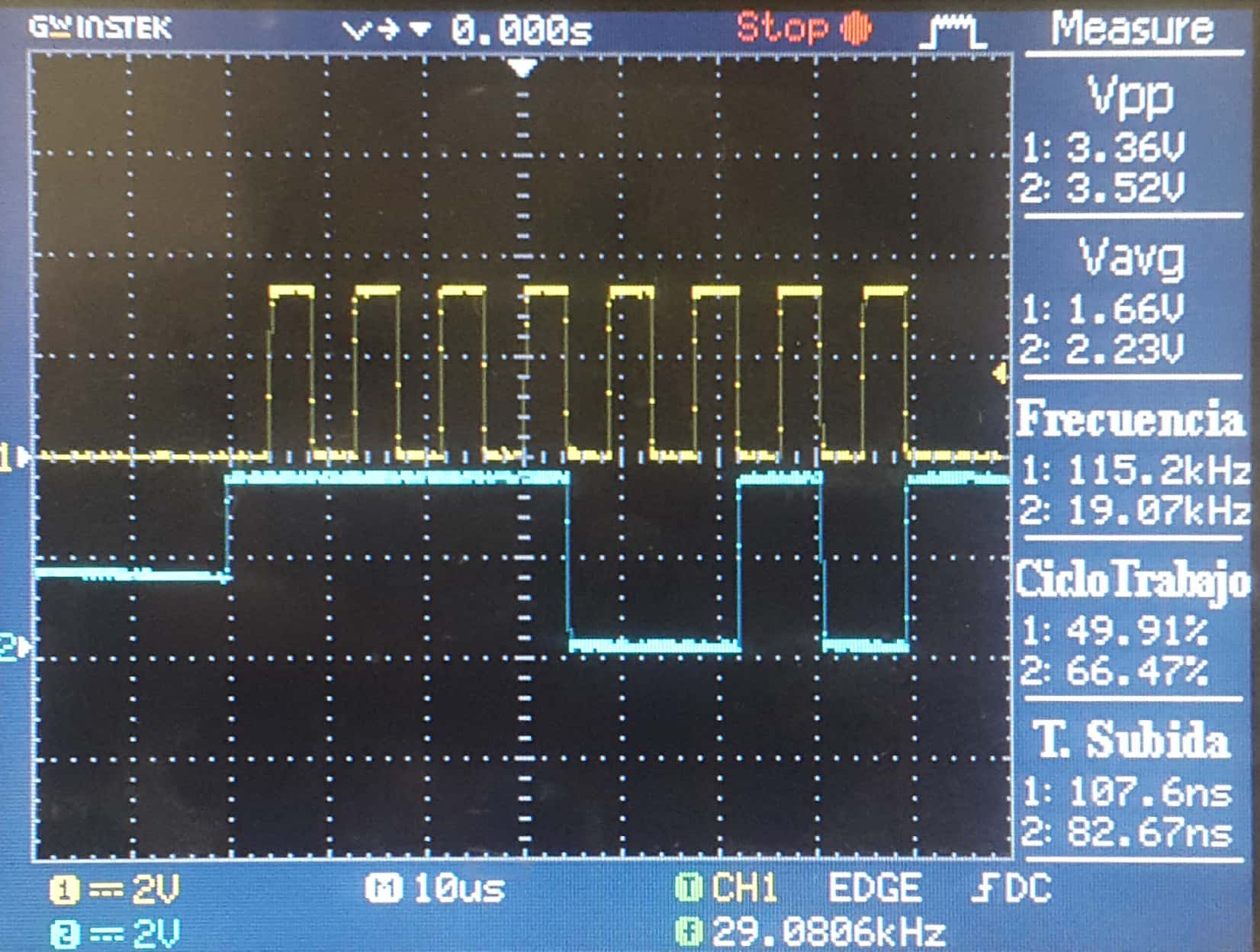
The yellow signal is the SCLK and the blue signal is the MISO
Please any help and thanks a lot,
Best Regards

