Other Parts Discussed in Thread: SN65HVD257EVM, , C2000WARE
Tool/software: Code Composer Studio
Dear all,
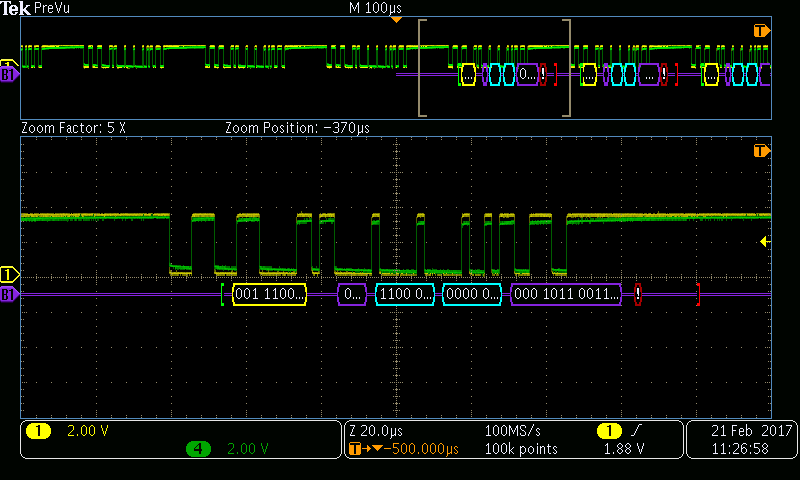
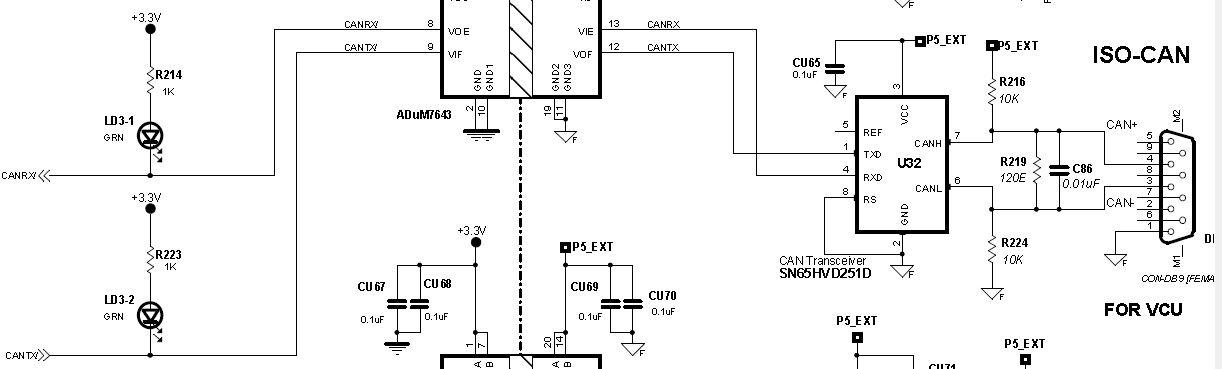
I am facing a problem regarding the Interconnections between two F28379X control Cards for CAN protocol testing. I have connected the two MCU Boards through DB9 connector at CAN Interface point (i.e VH and VL pins). I have dumped the source code of "CAN Loop Back" in both MCUs. So can anyone tell me the procedure of checking the output for testing CAN communications.
Thanks in advance.
Sumanta