Dear sir
I use the same driver to drive Y connection BLDC and delta connection BLDC
The Y connection is spin normally , but delta connection BLDC is fail
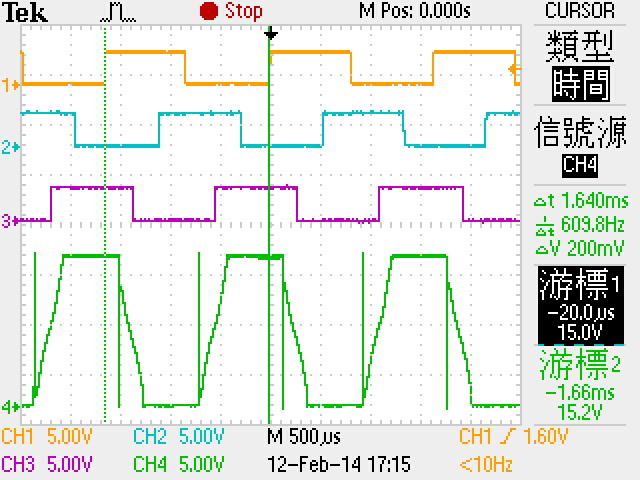
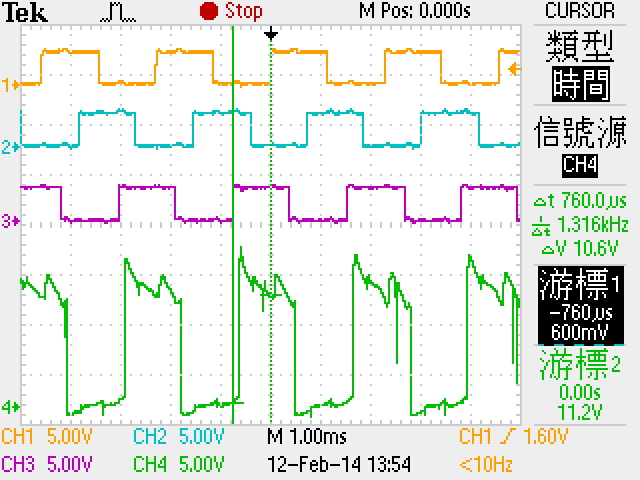
And this is the waveform below
CH1:HS1 CH2:HS2 CH3:HS3 CH4: U PHASE
Could anybody give a tip for drive the delta connection BLDC
Thanks.