Other Parts Discussed in Thread: CC1310
Tool/software: TI-RTOS
Dear community,
for my project I need to implement a SPI communication between a Master and some Slaves.
I started with some basic examples from here.
Master: Should send "Hello World" every 3 seconds.
Debugging: The status is "SPI_TRANSFER_COMPLETED", every time.
GPIO_init();
SPI_init();
SPI_Handle handle;
SPI_Params params;
SPI_Transaction transaction;
uint8_t txBuf[] = "Hello World"; // Transmit buffer
uint8_t rxBuf[11]; // Receive buffer
// Init SPI and specify non-default parameters
SPI_Params_init(¶ms);
params.bitRate = 1000000;
params.frameFormat = SPI_POL1_PHA1;
params.mode = SPI_MASTER;
// Configure the transaction
transaction.count = sizeof(txBuf);
transaction.txBuf = txBuf;
transaction.rxBuf = rxBuf;
// Open the SPI and perform the transfer
handle = SPI_open(Board_SPI0, ¶ms);
if (handle == NULL) {
/* Error opening SPI */
}
while (1) {
sleep(3);
GPIO_toggle(Board_GPIO_LED0);
SPI_transfer(handle, &transaction);
transaction.txBuf = txBuf;
}
-----------------------------------------------------------------------------------------------
Slave: Should receive the data and compares it
Debugging: SPI_transfer() never leaves its blocking mode.
GPIO_init();
SPI_init();
SPI_Handle handle;
SPI_Params params;
SPI_Transaction transaction;
uint8_t rxBuf[100]; // Receive buffer
uint8_t *s;
// Init SPI and specify non-default parameters
SPI_Params_init(¶ms);
params.bitRate = 1000000;
params.frameFormat = SPI_POL1_PHA1;
params.mode = SPI_SLAVE;
// Configure the transaction
transaction.count = 100;
transaction.txBuf = NULL;
transaction.rxBuf = rxBuf;
// Open the SPI and perform the transfer
handle = SPI_open(Board_SPI0, ¶ms);
if (handle == NULL) {
/* Error opening SPI */
}
while (1) {
SPI_transfer(handle, &transaction);
s = strstr(rxBuf, "Hello World"); // search for string "Hello World" in buff
if (s != NULL) // if successful then s now points at "Hello World"
{
GPIO_write(Board_GPIO_LED1, Board_GPIO_LED_ON);
} // index of "Hello World" in buff can be found by pointer subtraction
}
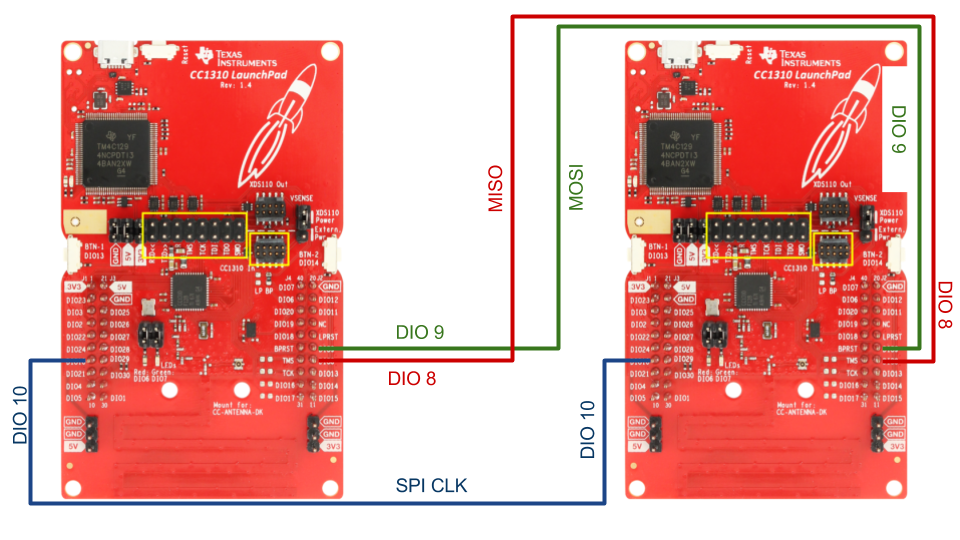
The launchpads were wired as seen below.
As I have seen in the CC1310_LAUNCHXL.h (line 131), the chip select (SPI CS, DIO 11) is unassigned.
Is an assignment required? And if so, how should it be implemented? Do I have to use the SPI_control() function with
SPICC26XXDMA_SET_CSN_PIN? If yes how is it called correctly?