

CAN(Controller Area Network)システムは、一般的なインターフェイスのように見えますが、CANシステムを設計および実装したりする際には、疑問や問題がたくさん湧き出てくるでしょう。すでに多くのエンジニアがこのような課題に取り組んできました。この「よく聞かれる質問」記事シリーズの第1部では、CANシステムの信号終端処理を取り上げます。
CANバス信号でネットワーク内のすべてのCANノードに信号を伝える際には、適切に終端が施されているかどうかが非常に重要となります。正しく終端されていないと、CANバスのように物理的に長い導体では信号反射が起こり得るため、バスの各所間の通信が制限される可能性があります。
CANが含まれるほとんどのアプリケーションは車内ネットワークに関係していますが、下記の質問と回答は産業用アプリケーションにも当てはまります。
質問 ①:1つのバスにはCANノードをいくつまで接続できますか?ノード数が制限される要因は何ですか?
1つのバス内でのCANノードの最大数はシステム要件に大きく依存しますが、主な制限要因は、一般的にCANトランシーバのバス入力インピーダンスです。ノード数は、以前は最大32でしたが、最新のCANトランシーバを用いる場合、この数がかなり増えます。これは、バスの入力インピーダンスが高くなったことと、バスとの間で流れるリーク電流を抑えられるようになったためです。
トランシーバは、バスのノード数が多すぎる場合に、バスとの間の過剰な電流をシンクまたはソースすることができます。個々のノードからバスにメッセージが送られるとき、トランシーバはバスのリーク電流のすべてをシンクまたはソースしながら、終端抵抗を介して標準電圧信号を駆動する必要があります。起こり得る事象は2つあり、1つは、トランシーバが追加電流を出力することで、信号電圧が低下し、許容される通信レベルを下回る可能性があり、極端なケースでは電流出力も制限されます。または、トランシーバがサーマル・シャットダウンするか、過大な電流需要に応えようとして破損します。
『TCAN1042』のような最新のCANトランシーバの差動入力インピーダンスは最小で30kΩであり、ISO 11898-2の仕様要件である最小12kΩ、最大100kΩに準拠しています。この入力インピーダンスから、理論的にバスは100個のノードに対応できます。入力インピーダンスが30kΩのトランシーバを100個並列に接続した場合、300Ωに相当し、これは60Ωのバス・インピーダンスと並列で50Ωに相当します。物理バス全体での信号損失、グランド・オフセット、寄生負荷、さらにその他の要因により、実際に接続可能なノード数はこれより少なくなる傾向があります。
質問 ②:終端は、CANバスのエンド・ノードのみに必要ですか、それともエンド・ポイントとエンド・ポイントの間にある各ノードに終端抵抗を配置しなければいけませんか?
CANバスの両方のエンド・ノードには、終端が必須です。両方のエンド・ノードに120Ωの終端を配置しないと、CANバスとドライバとのインピーダンス不整合による信号反射のせいで、通信品質の低下を招きます。
図1にシンプルなCANバス・トポロジを示します。このトポロジのエンド・ノードには終端が施されていますが、その間のノードには終端がありません。エンド・ポイントのノードではなくその間にあるノードの場合、終端は必要ではありませんが、これらのノードから作られるスタブが信号品質に影響するおそれがある場合は、終端が有効です。以前のISO 11898では、車載CANバスのスタブの長さは、1Mbpsで最長0.3mと規定されていました。これは長さの目安として便利ですが、この範囲に収まっていたとしても、スタブの影響を受けないという意味ではありません。

図1:エンド・ノードが終端されたシンプルなCANバス・トポロジ図
信号品質に問題がある場合は、分岐したノードにも終端を施すことで、スタブからのインピーダンス不整合による信号反射をいくらか減衰させることができます。実質的なバス・インピーダンスを低減しないように、このような終端には、標準の120Ωよりも大きな抵抗が必要です。バス・インピーダンスがCANトランシーバの要件を満たさないと、CANドライバが正しい電圧レベルを駆動できなくなります。一般的に、この終端抵抗の値は1kΩから2kΩの範囲になります。
質問 ③:CANトランシーバが正常に機能するには、コモンモード・チョークが必要ですか?なぜコモンモード・チョークが使われるのですか?
CANトランシーバがコントローラからCANバスへの信号を変換するのに、コモンモード・チョークは必須ではありません。先進運転支援システム(ADAS)、ゲートウェイ、インフォテインメントなどのほとんどの車載CANアプリケーションでは、プリント基板(PCB)にコモンモード・チョークが配置されていますが、CANトランシーバの正常な機能のためにPCBにコモンモード・チョークを実装する必要はありません。しかし、コモンモード・チョークは確かにCANトランシーバの電磁放射に有効で、CANバスから生じる高周波ノイズに対するトランシーバの電磁気耐性も向上します。
差動信号の場合、CANトランシーバから出る電磁放射プロファイル全体は、差動ノイズと同相ノイズの要素から構成されています。差動信号は、同じ大きさで逆方向の振幅になるように設計されているので、この信号から放射されるノイズも、同じ大きさで逆方向になります。結果としてほとんどの場合、差動ノイズは、それ自体で打ち消されます。
ノイズの同相部分への対処はそこまで簡単ではありません。そこで、コモンモード・チョークの出番になります。電流の変化に関連した高周波ノイズを締め出すフィルタ・インダクタとして機能するコモンモード・チョークは、CANトランシーバから電磁放射として生じる同相ノイズ、またはCANバスからCANトランシーバへ外方向に生じる同相ノイズに対して逆方向の磁場を発生させます。
そのため、CANトランシーバにコモンモード・チョークは必須ではないとしても、電磁ノイズに対する感度が高く影響を受けやすいことが問題となる環境では、コモンモード・チョークが役に立ちます。車のどの部分にも、このようにノイズの多い環境があり得ますが、いくつもの通信インターフェイスとそのバスが1つのシステムにつながる車載ゲートウェイには、より一般的に見られます。
質問 ④:CANトランシーバのSPLITピンの役割は何ですか?
SPLITピンの役割は、CANバスに対し、より強いリセッシブ電圧レベルを駆動することで、同相ノイズを最小限に抑え、その結果ノイズの放射レベルを下げることです。このピンは、分割終端方式で、2つの60Ω抵抗の間に接続されます。CANバスの対称性は、旧来の設計プロセスには最適でないため、同相信号の偏差がより大きくなります。旧来のCANトランシーバにあるSPLITピンはその偏差に有効で、これにより電磁放射を軽減できます。
SPLITピンは必要ないかもしれませんが、それでも、分割終端を使って電磁干渉を軽減する利点はあります。分割終端により、CANHとCANLの両方のラインにローパス・フィルタが作られ、トランシーバからバスに出る高周波ノイズの多くが低減されます。図2に、標準的な終端と分割終端方式の比較を示します。CSPLIT値の範囲は標準で4.7nF~100nFです。
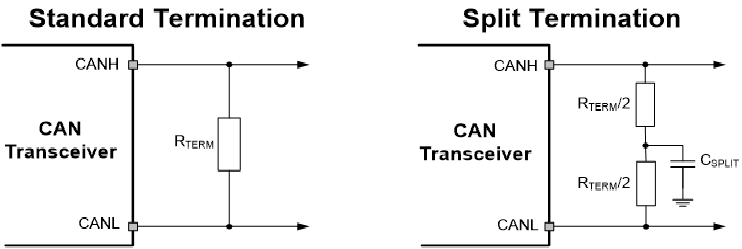
図2:CANトランシーバの標準的終端と分割終端方式の比較図
TIの『TCAN4550』、『TCAN1042-Q1』、『TCAN1043-Q1』のような最新のCANトランシーバは、SPLITピンがなくても正常に機能します。TIは、CANH信号とCANL信号の対称性を増すようにする最新のプロセスを使って、これらのデバイスを設計しています。結果として、差動信号の偏差がほとんどなく、これにより同相エミッションを低減できます。
まとめ
目標とするものは、電磁放射性能の改善であったり、インピーダンス不整合による信号反射の削減や除去であったり、CANシステムのサイズやノード数の決定であったりとさまざまかもしれませんが、確実な通信にはCANバスを正しく終端することが非常に重要です。これらの質問に対する回答がその道案内になるでしょう。
このシリーズの第2部では、さまざまな種類のCANトランシーバについてCANの消費電力を測定する方法と、CANシステムに3.3V電源レールが使われる理由と使用方法を詳しく説明します。
著者紹介
Eric Hackett(Texas Instruments)
※すべての登録商標および商標はそれぞれの所有者に帰属します。
※ご質問はE2E Support Forumにお願い致します。
