

CANの設計課題への対処 第2部:CANの電圧および電源の課題への対応
「CANの設計課題への対処」の第1部では、CAN(Controller Area Network)バスの設計と終端処理に関する詳細や課題について述べました。第2部となる今回は、消費電力についてと、CANアプリケーションに電圧レールが複数ある場合の設計方法に注目します。
CANトランシーバの消費電力の計算は思ったほど単純ではなく、トランシーバ関連の電圧レールが複数追加されると、さらに複雑さが増します。また、さまざまな特徴のCANトランシーバがあるなかで、トランシーバの選択を誤ったり、システムに必要のない電圧レールを追加してしまっているかもしれません。
質問①:動作状態のCANトランシーバの消費電力は、どのように計算しますか?
CANトランシーバの消費電力は、いろいろな面から捉えられます。図1に、デバイスがリセッシブ状態のときのデバイスへの電力供給に必要な静止電流の部分を青で、CANバスをドミナントに駆動するのに必要な電流の部分を赤で示します。
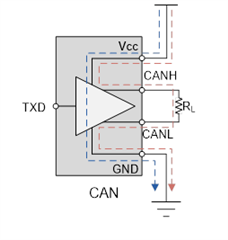 図1:デバイスへの電力供給に必要な静止電流を表したCANトランシーバの電流の流れ
図1:デバイスへの電力供給に必要な静止電流を表したCANトランシーバの電流の流れ
CANトランシーバの消費電力を正確に見極めるには、トランシーバが各バス状態のときの時間の長さに加えて、次のようなパラメータを把握・推定・測定することが必要です。
- バスがリセッシブ状態のときのトランシーバの消費電流
- バスがドミナント状態のときのトランシーバの消費電流
- バスがドミナント状態のときとリセッシブ状態のときの合計時間の比率
- ドミナント状態での差動出力電圧
- VCC電源電圧
- VIO電源電圧(VIOピンがある場合)
- 入出力(I/O)電源電流(VIOピンがある場合)
この計算の、リセッシブ/ドミナント状態でのトランシーバの消費電流と、バスがリセッシブ/ドミナント状態に置かれている時間については、説明は不要でしょう。この2つの状態の消費電流が大きく異なることと、通信中のCANバス状態が常に変化することから、どれくらいの時間バスがリセッシブ状態またはドミナント状態にあるかが、トランシーバの消費電力を大きく左右します。
VCC電源から消費される電力の一部が終端抵抗を経由するという理由から、ドミナント状態での差動出力電圧が必要です。この抵抗による電圧降下を把握することは、この抵抗を通して消費される電流量を判断するのに役立ちます。
バスがリセッシブ状態のときは、抵抗による大幅な電圧降下がない(もしくはまったく電圧降下がない)はずなので、リセッシブ状態での差動出力電圧は必要ありません。また、CANHとCANLは、まったく同じ電圧ではないとしても、互いの差は数十ミリボルト以内になるはずです。抵抗を通る電流はなく、トランシーバはバスに大量の電力を供給しません。
これらすべての変数を理解したところで、式1に消費電力の計算式を示します。
P = [(1-D)*IREC*VCC] + [D*IDOM*(VCC-VOD)] (1)
式2は、VIOピン付きトランシーバの場合の計算式です。
P = [(1-D)*IREC*VCC] + [D*IDOM*(VCC-VOD)] + VIO*IIO (2)
ここで、Pは電力、Dはバスがドミナント状態である時間の比率、VCCはトランシーバの電源電圧、IRECはリセッシブ状態のときのVCCからの消費電流、IDOMはドミナント状態のときのVCCからの消費電流、VODはドミナント状態のバスの差動出力電圧、VIOはデバイスのIO電圧(VIOピンがある場合)、IIOはデバイスのI/O電流です。
では、CAN-FD(CAN Flexible Data Rate)トランシーバである『TCAN1042』を例に取り、このデバイスの状態が50%の時間でドミナント、50%でリセッシブだとします。VCC = 5V、IREC = 1.5mA、IDOM = 40mA、VOD = 2.25V、D = 0.5とし、これらの値を式1に当てはめた結果は以下になります。
P = [(1-0.5)*1.5*5] + [(0.5)*40*(5-2.25)] = 3.75 mW + 55 mW = 58.75 mW
このように、電力計算は必ずしも直観的にできる作業ではありませんが、正しいパラメータを使えば単純化できることがおわかりいただけたでしょう。
質問②:同じバスで5Vと3.3VのCANトランシーバを混在させることはできますか?
はい、できます。3.3V CANトランシーバでは、相手のCANトランシーバが5Vまたは3.3Vのどちらであってもメッセージを正しく送受信できるように、リセッシブ・レベルと、ドミナントとリセッシブの閾値が設計されています。3.3V CANトランシーバ・ファミリには、1.85Vと2.3Vの2つのリセッシブ・レベルが存在します。『SN65HVD230』のような車載3.3V CANバス・トランシーバは、5V CANトランシーバとの連携が最適になるよう考えられた2.3Vのリセッシブ・レベルを備えます。『TCAN330』のようなCAN-FD機能付き3.3V CANトランシーバも、5V CANトランシーバと一緒に運用することができますが、個々のデバイスの電磁干渉を最小限に抑えるために、1.85Vのリセッシブ・レベルで設計されています。ビルおよびセキュリティ・オートメーションや空調システムなどの産業用アプリケーションでは、この種のシステムに3.3Vの電圧レールしか用意されないこともあり、5V CANトランシーバに比べて省電力という理由で3.3Vのトランシーバが使われます。
質問③:使用するマイコンのロジック電源が3.3Vの場合は、3.3V CANトランシーバが必要ですか?
3.3V CANバスを扱っていない限り、3.3V CANトランシーバは必要ありません。3.3V CANトランシーバと、3.3Vロジック電源に対応できるCANトランシーバには、違いがあります。3.3V CANトランシーバは、3.3VのVCC電源電圧を使用し、通常は産業用アプリケーションで使われます。CANバスは3.3Vを基準とするので、より標準的な5V CANトランシーバと比べてリセッシブ電圧とドミナント電圧が異なります。
マイコンが接続するのは、TXD、RXD、STBなどのCANトランシーバのロジック・ピンのみであり、実際のCANバスとはインターフェイス接続しません。そのため、対象のマイコンが3.3Vロジック電源を使用する場合、CANバスは5Vのまま、『TCAN1042V』や『TCAN1051V』のような、3.3V電源電圧を基準とするロジック・ピン付きのCANトランシーバを使用できます。ピン5はVIOピンなので、これらのトランシーバのピン5に3.3Vを印加することで、RXDピン、TXDピン、およびSTB/Sピンで3.3Vのロジック・レベルを使用できます。図2に、この構成を示します。
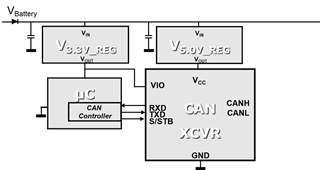 図2:3.3Vマイコンと5V CANトランシーバが接続されたCANノード
図2:3.3Vマイコンと5V CANトランシーバが接続されたCANノード
まとめ
5Vの世界から外れたCANについて考えていると、頭が混乱してくるように感じられるでしょうが、各種のトランシーバの機能を理解しさえすれば、正しいトランシーバを選択したり、トランシーバが消費する電力を計算したりといったことが簡単にできるようになるでしょう。
著者紹介
Eric Hackett(Texas Instruments)
※すべての登録商標および商標はそれぞれの所有者に帰属します。
※ご質問はE2E Support Forumにお願い致します。