

消費電力低減を目指す世界的な動きは増加の一途をたどっています。多くの国や地域は、図 1 に示すような各種家電製品に対して、China Institute of Standards (CNIS:中国標準化研究院)、米国の Energy Star (エナジー・スター)、ドイツの Blue Angel (ブルー・エンジェル) のような各種機関が制定した効率規格への適合を求めています。システム設計者はこれらの規格に適合できるように、シンプルな使いやすい単相 AC 誘導モーター (VVVF) ベースの設計から、より電力効率の優れた低電圧ブラシレス DC (BLDC) モーターへの移行を次第に進めています。ロボット型掃除機のような小型家電製品の設計者は、より長期的な動作寿命と、よりノイズの小さい動作を実現するために、多くのシステムを、より高度な BLDC モーターに移行する作業も進めています。同時に、永久磁石の技術進歩により、従来と同じトルク (負荷) を維持しながら、BLDC モーター製造の簡素化やシステム・サイズの縮小を進めることもできます。これら以外に、効率の向上や、より静かなシステムという付加的な利点も達成できます。
 図 1:代表的な家電製品
図 1:代表的な家電製品
BLDC モーターを搭載したシステムの設計は、信頼性の高いリアルタイム制御を実現するために複雑なハードウェア設計や最適化済みソフトウェア設計を必要とすることが多いので、時には課題が伴うことがあります。設計サイクルを迅速化するためのオプションの 1 つは、専門のベンダから BLDC モーター・モジュールを購入して採用することです。ただし、これらのモジュールは特定のシステム・ニーズに合わせた最適化を実施していません。そのため、開発中の具体的なアプリケーションに合わせて最適化済みの高性能システムを構築するには、そのようなモジュールを使用する場合であっても、引き続きモーターの設計と制御に関して詳細に理解しておく必要があります。この記事は、BLDC モーター・システムの設計を迅速化すると同時に、エネルギー効率に優れ、よりスマートで、より小型のソリューションを実現する 3 つの方法について説明します。
方法 1:プログラミング不要のセンサレス制御
プログラミング不要のモーター・ドライバが採用している組込みの制御用整流アルゴリズムを使用すると、モーター制御ソフトウェアの開発、保守、認定が不要になります。これらのモーター・ドライバは通常、モーターからフィードバックを受け取ります。たとえば、ホール信号や、モーターの相電圧と相電流の信号などです。次いで、モーター・ドライバは複数の複雑な制御式をリアルタイムで計算し、モーターの次の駆動状態を判定した後、パルス幅変調 (PWM) 信号を生成して、ゲート・ドライバや MOSFET (金属酸化膜半導体電界効果トランジスタ) のようなアナログ・フロント・エンド素子に渡します (図 2 を参照)。
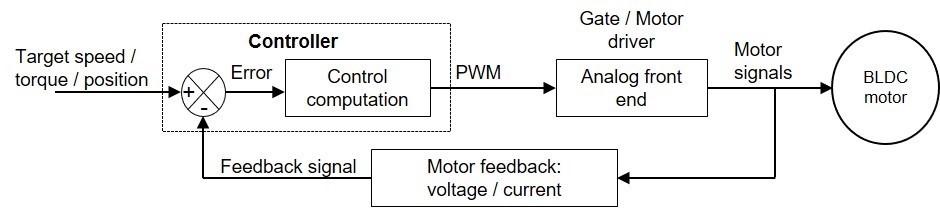 図 2: 代表的なセンサレス BLDC モーター・システム
図 2: 代表的なセンサレス BLDC モーター・システム
FOC (磁界方向制御、フィールド・オリエンテッド・コントロール) を搭載している TI の 『MCF8316A』 モーター・ドライバなど、センサレス制御機能を統合済みのリアルタイム制御用モーター・ドライバを使用すると、モーター内のホール・エフェクト・センサが不要になるので、システムの信頼性が向上し、合計システム・コストを削減することができます。また、プログラミング不要のモーター・ドライバはモーター故障検出などの重要な機能も管理し、システム設計全体の信頼性をいっそう向上させるために複数の保護メカニズムを実装しています。これらのデバイスの中には、UL (Underwriters Laboratories) のような認証機関による事前認証済みの制御アルゴリズムを実装した形で出荷されている製品があり、OEM (家電製品のメーカー) はそれらの製品を採用すると家電製品の設計期間を短縮できます。
方法 2:インテリジェントなモーター制御による容易なモーター・チューニング
速度、効率、騒音ノイズなど、システム性能パラメータを満たすように BLDC モーターをチューニングする作業は、時に困難なことがあります。センサレス矩形波制御アルゴリズムを開発することは可能ですが、この場合、モーターの逆起電力 (BMEF) 電圧を使用して整流を決定することになり、モーターのパラメータから独立した形でチューニングを実施することになります。センサレス矩形波制御機能を内蔵した 『MCT8316A』 のような統合型モーター・ドライバは、マイコンとの複雑なインターフェイスを使用せずに、最適化済みのシステム性能を実現することができます。加えて、モーターのチューニング・プロセスを実行する際の基準信号として、モーター・ドライバが取得するフィードバック信号を使用することもできます。該当するのは、モーターの相電圧、相電流、モーターの速度などであり、これらはオシロスコープで確認できます。
センサレス FOC アルゴリズムでは、高度な制御手法を採用することで、モーターのチューニングを大幅に迅速化できます。たとえば、モーターの各種パラメータを内蔵機能だけで自動的に測定することや、制御ループのチューニングを自動化することもできます。GUI (グラフィカル・ユーザー・インターフェイス) を使用してガイド付きチューニングを実行すると、図 3 に示すようなモーター起動時に使用するデフォルト・オプションが表示されるので、これをチューニング・プロセスの支援ツールとして活用し、モーターを迅速に動作させることができます。FOC 向けの 『MCF8316A』 や、矩形波制御向けの 『MCT8316A』 のようなプログラミング不要のモーター・ドライバは、モーター起動に加え、閉ループやモーター停止動作にも対応した複数の構成可能オプションを搭載しています。これらを活用すると、数分でモーターの性能を最適化できるので、設計サイクル期間を大幅に短縮することができます。
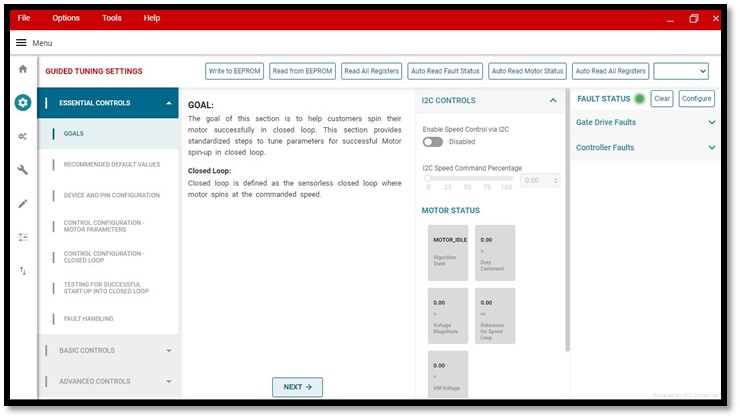 図 3:ガイド付きチューニング向け GUI
図 3:ガイド付きチューニング向け GUI
方法 3:小型化
BLDC システム向けのハードウェア製作と聞くと、多くのシステム設計者は難易度が高そうだと考えて敬遠しがちです。一般的なシステムで必要となるのは、ゲート・ドライバ、MOSFET、電流センス・アンプ、電圧センス・コンパレータ、A/D コンバータです。また大半のシステムでは、ボード上のすべての部品に電力を供給するために、低ドロップアウト (LDO) レギュレータや DC/DC 降圧レギュレータのようなデバイスを含む専用の電源アーキテクチャを必要とします。統合型 BLDC ドライバはこれらの部品すべてを組み合わせたもので、図 4 に示すような小型かつ使いやすいソリューションを実現します。
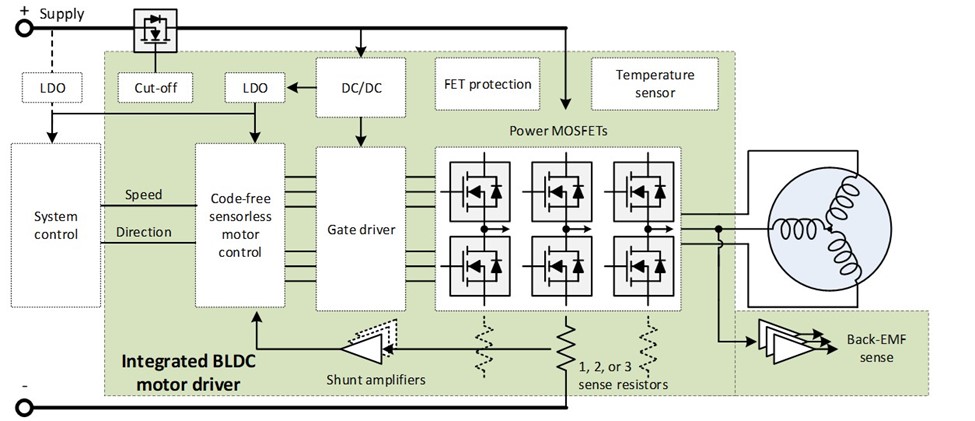 図 4:完全統合型 BLDC モーター・ソリューションの例
図 4:完全統合型 BLDC モーター・ソリューションの例
各種制御機能を内蔵したモーター・ドライバは、MOSFET の過電流と過電圧の保護機能や、温度監視機能などを搭載しており、設計者は強力なソリューションを簡単に製作できます。ロボット型掃除機、住宅の天井ファン、洗濯機内のポンプなど、電力が 70W 未満のモーター・アプリケーションの場合、MOSFET を内蔵したデバイスを選定し、ボード面積をいっそう節減することができます。『MCF8316A』と『MCT8316A』の各デバイスは、24V アプリケーションの場合、最大 8A のピーク電流に対応できます。大電力アプリケーションの場合、ボード上に複数のパワー MOSFET を配置し、ゲート・ドライバとモーター制御機能をワンチップに統合した製品を組み合わせることができます。
この記事で説明した考え方は、システム設計サイクルの迅速化を可能にすると同時に、BLDC モーター・システムの小型化とスマート化にも寄与します。『MCF8316A』や『MCT8316A』など、プログラミング不要の統合型センサレス制御 BLDC モーター・ドライバは、最適化済みで高性能のリアルタイム制御システムを迅速に設計するのに役立ちます。これらのデバイスは、24Vアプリケーションで最大 70W の電力を供給できます。これらのモーター・ドライバはどちらも、統合型のインテリジェント制御手法を採用しており、チューニングが容易で、高性能かつ高信頼性のシステム・ソリューションを可能にします。また、これらは、低電圧でエネルギー効率の優れた BLDC ベースの次期システムを製作するときに、有力な選択肢になります。
※すべての登録商標および商標はそれぞれの所有者に帰属します。
※上記の記事はこちらの技術記事(2021年9月7日)より翻訳転載されました。
※ご質問はE2E Support Forumにお願い致します。