

Euro NCAP (Euro New Car Assessment Program:欧州の新車評価プログラム) は最近、新しい自動車の運転支援機能を向上させるために、レーダーに関する各種規格を更新しました。
NCAP の各種規格は地域によって異なっています。米国の場合、NCAP は NHTSA (National Highway and Traffic Safety Administration:米国運輸省道路交通安全局) の管轄下にあり、Global NCAP が中心的な組織となっています。ただし、どの組織も、自動車とドライバーの安全性向上につながる各種規格を制定するという同じ目標を共有しています。これらの組織は、0 ~ 5 個の星で示されるレーティングを提示しており、消費者は新車を購入する際の情報として活用することができます。
これまで多くの機会に、Euro NCAP は一連の規格を最初に制定することで、世界全体の自動車業界に課される基準を引き上げてきました。最新の規制である協定規則第 79 号 (R79) は、死角検出と車線変更支援に使用するレーダーの最小距離と最小動作速度を規定しています。
レーダーの場合、「Minimum distance and minimum operation speed」 (最小距離と最小動作速度) (5.6.4.8 条) という条項は、カテゴリー C の ACSF (自動操舵) による車線変更操作の実施が許可される最小の動作速度 Vsmin を、レーダーがサポートできる最小距離 Srear とともに規定しています。
言い換えると、この規定は、カテゴリー C の ACSF が LCM を実行する最小動作速度の 20km/h 走行時に、死角検出レーダー・センサがどれほど離れた距離で検出を行えるのかを確認するために役立ちます。
車線変更時の安全性向上
安全な車線変更操作とは、2 台の自動車の間で常に安全な走行中車間距離を維持できるように、接近してくる自動車が反応 (減速) までに十分な時間を確保できる状態での車線変更を意味します。特に、協定規則 R79 は (5.6.4.7 条で)、自車による車線変更操作の臨界状況を規定しています。これは、自車と移動先車線上で接近してくる他車との間の車間距離が時間にして 1 秒を下回らない (自車が特定の位置を通過してから 1 秒以上後に他車がその位置を通過する) ために、自車の車線変更操作の開始から 0.4 秒後に他車が 3m/s² を上回るレベルで減速しなければならない状況を指します。
接近してくる他車の距離と速度、および自車の速度を把握できている場合、車線変更開始時点での 2 台の自動車間の臨界距離 Scritical (5.6.4.7.1 条) を計算することができます。 車線変更操作を開始する時点で 2 台の自動車間の距離が Scritical 未満の場合、操作は許可されません。 次の図 1 に、自車の速度に対する関数として Scritical を図示します自車の速度が 20km/h の場合、臨界距離が 180m 近くに達することに注意してください。
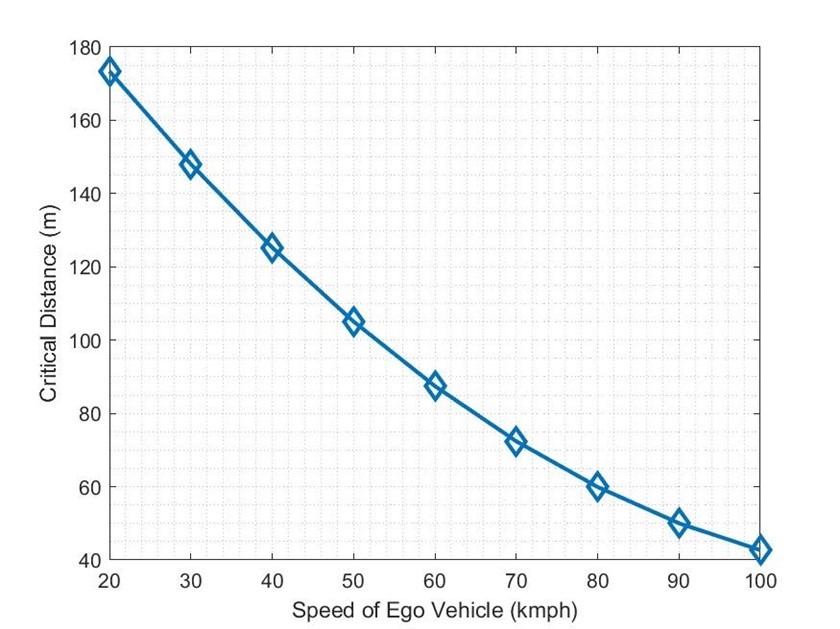 図 1:安全臨界車線変更を行うために必要な距離と速度のプロット
図 1:安全臨界車線変更を行うために必要な距離と速度のプロット
したがって、効果的な車線変更を実施するには、接近してくる他車を検出し、その距離を推定することが重要です。同協定規則の 5.6.4.8 条で規定されているように、隣接する車線で後方から接近している他車を自車が確実に検出できる最小距離 (Srear) を各メーカーが宣言する必要があります (同協定規則では、Srear をテストする際に二輪車を使用するよう求めています)。宣言済みの Srear に基づき、同協定規則は最小動作速度 (Vsmin) を定義しています。この速度は自車が車線変更を実行することができる最小の速度であり、その場合の前提は、図 2 に示すように、接近してくる他車が Srear の距離にあり、その速度が 130km/h であることです。
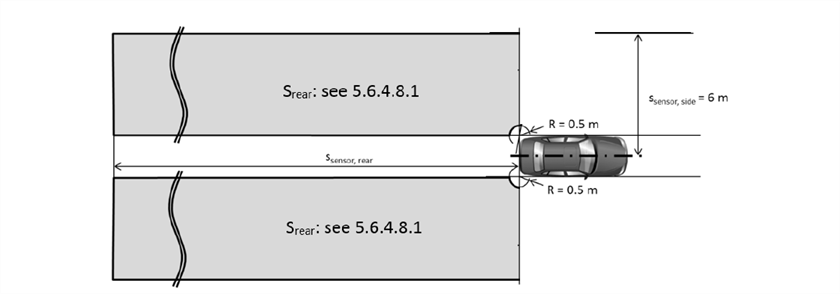 図 2:速度と距離に関する NCAP 協定規則の図(画像の出典:UN Regulation No. 79 (国連規則第 79 号))
図 2:速度と距離に関する NCAP 協定規則の図(画像の出典:UN Regulation No. 79 (国連規則第 79 号))
隣接する車線内で接近してくる他車を検出する能力が自車に欠落している場合、同協定規則が規定するワースト・ケースの想定は、接近してくる未検出の他車が Srear の距離にあり、130km/h の速度で走行していることです。この状況では、自車の速度が Vsmin 未満の場合、車線変更は許可されません。一方、Srear 未満の距離にあって接近してくる他車を自車が検出した場合、状況が臨界とみなされなければ (つまり、接近してくる他車と自車の間の距離が (5.6.4.7.1 条で定義されている) Scritical を上回っていれば)、Vsmin 未満の速度で車線変更を開始することができます。
 図 3:170m 以上離れた二輪車の検出
図 3:170m 以上離れた二輪車の検出
TI の 『AWR2944』 は、自動車メーカー各社が上記の NCAP 安全性要件を満たすことを可能にする初のシングルチップ・コーナー・レーダー・センサです。3 個のトランスミッタ・デバイスを使用する従来の方式に比べて、4 個目のトランスミッタを使用することで角度分解能を 33% 向上させ、クラス最高の RF 性能による比類のないコーナー・レーダー性能を実現できます。ここに、いくつかの使用状況での複数のテスト結果を掲載します。
 図 4:200m 以上離れた自動車を検出
図 4:200m 以上離れた自動車を検出
コーナー・レーダーに適した TI のミリ波レーダー・センサで NCAP の要件に適合
より長い距離に対応する高分解能レーダーを採用すると、自動車はより速い速度で接近してくる他車を、より離れた距離のうちに検出し、車線変更や交差点でのナビゲーションにおける安全性をいっそう高めることができます。TI のコーナー・レーダーを採用すると、自動車メーカー各社は NCAP の最新の安全性要件に適合しやすくなり、世界各地で運転の安全性向上に貢献できます。
参考情報:
+『AWR2944』製品詳細
+ハイエンド・コーナー・レーダーのリファレンス・デザイン
+『AWR2944』評価基板
+『AWR2944』デバイス・サンプル・オーダー
+『LP87745-Q1』製品詳細
※すべての登録商標および商標はそれぞれの所有者に帰属します。
※上記の記事はこちらの技術記事(2022年1月4日)より翻訳転載されました。
※ご質問はE2E Support Forumにお願い致します。