

外科手術から、製造プラントで数千 kg の重量を持ち上げる業務まで、ロボットは私たちの生活の多様な分野で作業負荷の軽減に役立っています。私たちが暮らす現代社会にロボットが及ぼすインパクトは明白です。目を見張るほどに高精度、迅速、強力なロボット システムの動作が、いったいどのような方法で実現しているのだろうか、と疑問を感じたことはあるでしょうか?「モーターがあるから」、というのが正しい答えです。
ロボットは多くの場合、人間が実行するはずの行動を模倣します。したがって、位置や向きを調整するために、ロボットの動作には何らかの移動または回転が関係しています。そのような動きを実現するのは、通常はモーターです。
従来の使用事例では、アームの動作やベルトコンベアの回転運動など機械的なアクチュエータ駆動に注目するのに対し、最新の使用事例は、カメラの回転や、LIDAR センサの高精度な機械的ビーム ステアリングなどシンプルなものです。基本的なファンやポンプは、冷却や油圧駆動にとって非常に役立つ装置ですが、これらの装置がモーターの基礎的なアプリケーションであると知ったら、驚きを感じる人もいることでしょう。
ビデオ:TI が革新的な半導体を活用してロボットを強化する方法をご覧ください
たとえば、ロボット アームの関節にあるブラシレス DC (BLDC) モーター (図 1 ) は、回転するローターと、固定的な位置にとどまるステーターで構成されています。固定子のコイル巻線を励磁するために電気信号を印加すると、磁界が発生します。それにより、回転子を動かそうとする磁力が生じ、ロボットのアーム内で関節が回転することになります。これらの電気信号を正しい方法で使用すると、ロボットのアームは単に動くだけではなく、特定の速度、高精度の位置、トルクで動けるようになります。
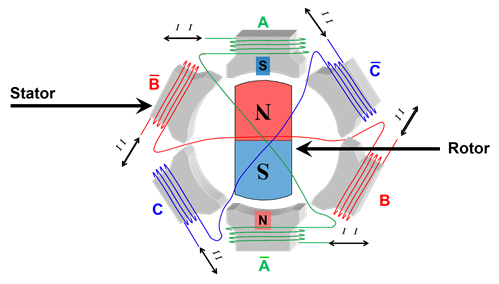
図 1:BLDC モーターの構造を示す断面図
モーターが次世代のロボットを駆動する方法
動きに関わる高精度かつ強力なタスクに加え、マイコン (MCU) や統合型モーター ドライバのようなモーター制御半導体の進歩に伴い、ロボットの動作はさらに向上しています。この目標を達成するための 4 つの具体的な課題に注目してみましょう。
課題その 1:人間とロボットの連係動作を実現するための安全性要件の向上
安全性に関する従来の検討事項では、人間とロボットを厳密に物理的に分離する必要があります。通常は、囲いの中にロボットを配置します。オートメーションの進展に伴い、さらに密接な協力と連携が必要になっています。協力ロボット (collaborative robot:コボット) は生産性の向上に役立ちますが、そこで使用されるモーターには、安全な停止や、安全な速度、トルク、モーション制御が求められます。
C2000 32 ビット マイコンである TMS320F28P650DK のようなデバイスは、安全性要件を達成するうえで重要な役割を演じます。これらのデバイスは、機能安全の認証を取得済みであり、診断用の安全性ペリフェラルを内蔵しているため、ISO (国際標準化機構) 10218 (産業用ロボットの安全規格) に適合する設計を簡素化するのに役立ちます。アナログ側では、DRV8353F のようなスマート ゲート ドライバに TÜV SÜD 承認済みの技術報告書が付属しており、エンジニアが安全性目標を達成するのに役立ちます。このサポート資料は、IEC 61800-5-2 (速度調整可能な電動ドライブ システムの機能安全要件) に従ってセーフ トルク オフ機能を実装するために必要な設計ステップにおいてエンジニアを支援します。マイコンまたはゲート ドライバといった特定の部品を採用することで、機能安全を満たすモーター システムの設計プロセスの難易度を引き下げることができます。
32 ビット マイコンである TMS320F28P650DK のようなデバイスは、安全性要件を達成するうえで重要な役割を演じます。これらのデバイスは、機能安全の認証を取得済みであり、診断用の安全性ペリフェラルを内蔵しているため、ISO (国際標準化機構) 10218 (産業用ロボットの安全規格) に適合する設計を簡素化するのに役立ちます。アナログ側では、DRV8353F のようなスマート ゲート ドライバに TÜV SÜD 承認済みの技術報告書が付属しており、エンジニアが安全性目標を達成するのに役立ちます。このサポート資料は、IEC 61800-5-2 (速度調整可能な電動ドライブ システムの機能安全要件) に従ってセーフ トルク オフ機能を実装するために必要な設計ステップにおいてエンジニアを支援します。マイコンまたはゲート ドライバといった特定の部品を採用することで、機能安全を満たすモーター システムの設計プロセスの難易度を引き下げることができます。
課題その 2:分散型のモーター アーキテクチャを通じて、重量、ケーブル配線、コストを削減
モーター向けの電子回路は、従来の制御盤から、ロボットの関節への直接的な統合に移行しつつあります。その結果、重量、ケーブル配線、システム コストの削減に役立ちます。このトレンドに従い、部品メーカー各社は、より小型の IC パッケージに、より多くの機能を統合するソリューションの開発を進めています。スペースに関する制約も、電力密度と電力効率の向上が求められる要因の 1 つです。
LMG3422R050 などの GaN FET は、ゲート ドライバを内蔵しており、電力段の効率を 99% 以上まで押し上げることができるため、統合型モーターでヒートシンクを小型化または不要にするのに役立ちます。TMS320F28065 のようなマイコンを採用するシステムは、リアルタイム通信ペリフェラルやアブソリュート エンコーダ インターフェイスを使用し、ピコ秒 (ps) 単位の分解能でパルス幅変調 (PWM) 信号を生成することができます。これらの機能を活用すると、ロボット アーム全体で、モーター 1 個ごとに 10 本以上の配線が必要だったものを 2 線式バスに減らすことができ、ケーブル配線量を削減できます。マイコンと GaN FET をこの構成で使用すると、設計者は DP83TG721 のようなイーサネット物理層トランシーバを通じてシングルペア イーサネット機能を追加し、有線接続を最適化することができます。
課題その 3:精密な動作タスクを自動化するための精度と正確さの向上
多くのアプリケーションで製品の小型化を進めると、モーターの選択肢 (サーボ、ステッパ、BLDC) に影響が生じます。より小型化したこれらの製品と連動して高精度動作を実現できるように、モーター制御と位置フィードバックに関する複雑さが増大します。半導体のさまざまな革新により、小型化の推進に必要な精度向上を実現できるようになりつつあります。たとえば、AMC3306 のような電流 センサは、±50μV の小さいオフセットを達成しており、内蔵型電源も搭載しています。これらの機能を 1 つのパッケージに統合することで、制御ループ内の精度向上と、プリント基板全体のサイズ小型化の両方を実現できます。
課題その 4:バッテリ駆動のモバイル アプリケーションに役立つ、電力効率の最適化
ロボットは、据え置き型ばかりではありません。ロボット アプリケーションのモバイル化が進展しており、荷物の自律的な配達や地形の安全な探索などに向けて導入が進んでいます。センシング、プロセッシング、リアルタイム制御といったアプリケーションを想定した現在と未来の半導体は、適切なバッテリ持続時間や実現可能な移動距離を確保するために、高性能と電力効率の間でバランスを取る必要があります。
電力効率の達成には、必ずしも複雑な工程や、複数のディスクリート部品を使用した複雑な設計アプローチが必要なわけではありません。たとえば、MCT8316A のようなシングル モーター コントローラは、ロボット内の電力消費部品を減らし、小型ポンプや小型ファンのモーターを効率よく動作させるのに役立ちます。この高集積デバイスは、6 個の MOSFET (金属酸化膜半導体電界効果トランジスタ) で構成されるハーフブリッジ電力段でモーター電流を供給し、またデジタル コアにより、コードの作成なしでシンプルな台形波モーター制御を実現できます。
モーター制御の今後の予測
未来のロボットは、現段階では不可能と感じるほどの短時間で業務を完了させ、私たちはそれを目にして本当に驚くことになるでしょう。海洋にある最も深い海溝での活動や、宇宙分野でまだ知られていない新規事業などで多数が活躍すると考えられます。新しい設計では、進化を続けるセンサがますます多く搭載されていくでしょう。かつて LIDAR や超音波テクノロジーが導入された際に、私たちが目にしたのと同様の状況です。私たちがロボットと情報を交換する方法も変化する可能性があります。以前の有線型ロボットから、現在のソフトウェア主導のソリューションへの移行と同様です。ロボットに対するアクセス方法も、より信頼性の高い方法で制御できる可能性があります。音声、視覚的表現、場合によっては私たちが思いに浮かべるだけで、ロボットが動作することもあり得ます。そして、ロボット向けのテクノロジーやアプリケーションが継続的に進化するのに伴い、それらを動かすモーターも進化し続けていくことでしょう。