


ロボット システムは反復作業を自動化するもので、複雑な動作やパワーを必要とする動作を行い、人間にとって危険な環境や有害な環境でも作業をこなすことができます。より集積度が高く、より高性能のマイコン (MCU) を使用すると、電力効率が向上し、よりスムーズかつ安全な動作を高い精度で実現できるため、生産性が高まり、自動化が促進されます。たとえば、レーザー溶接、高精度塗装、インクジェット プリント、3D プリントを扱うアプリケーションでは、場合によっては 0.1mm 以内の高い精度が重要になります。
最終的には、ロボット アームの軸数と必要な制御アーキテクチャの種類 (集中型または分散型) によって、そのシステムに適したマイコン、つまりモーター制御用集積回路 (IC) が決まります。最新の工場では、さまざまな製造段階に対処するために、軸数が異なり、x、y、z 平面での動きと回転の範囲が異なる各種のロボットを使用しています。そのため、工場のフロア全体に、さまざまな制御アーキテクチャが混在しています。
マイコンを選択する際には、性能向上の余地があって、将来的にスケーラブルであり、機能を追加できるマイコンを選ぶことが重要です。スケーラビリティと機能の追加を計画することで、設計プロセスのコスト、時間、複雑さを低減できます。
この記事では、2 種類のモーター制御アーキテクチャとして、集中型と分散型 (非集中型) について説明し、さらに、これらのアーキテクチャを実現する内蔵型リアルタイム マイコンに関する設計上の検討事項についても解説します。
集中型アーキテクチャ
集中型システムでは、1 つのマイコンを使用して複数の軸を制御します。このアプローチは、大型のヒートシンクと冷却ファンが必要なハイパワーのモーター ドライバ (通常 2 ~ 3kW 以上) の放熱を扱う際に有効です。このアーキテクチャでは通常、リゾルバ ボードか、エンコーダに接続されたアグリゲータを介して、位置データが外部で取得されます。
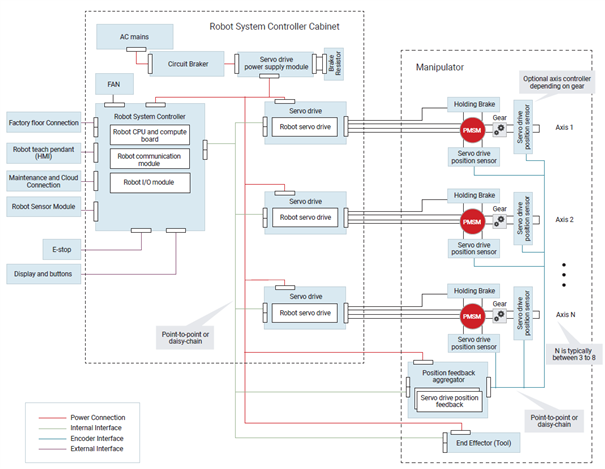
図 1:多軸システム向けの集中型モーター制御アーキテクチャのブロック図
通常、このアーキテクチャでは、複数の出力段が同じ PCB 上または近接した位置にあるため、1 つのマイコンで複数の軸を制御できます。このアプローチを使用すると、複数のモーター制御マイコン間の長い通信ラインが不要なため、多軸間のリアルタイム制御と同期を簡単に実現できます。
集中型アーキテクチャのモーター制御マイコン / MPU では、R5F コアや DSP などの高性能リアルタイム プロセッシング コア、EtherCAT などのリアルタイム通信インターフェイス、十分な数の PMW チャネル、電圧および電流センシング用のペリフェラルが主に必要です。Am243x などのマイコンは、スケーラブルな多軸システムの実現に役立ち、最大 6 軸のリアルタイム制御ペリフェラルとリアルタイム通信を単一のチップで提供します。
従来、自動化システムの集中型モーター制御では FPGA または ASIC デバイスを主に使用していました。しかし、最近では、AM243x などの最新の ARM Cortex ベースのマイコンの人気が高まっています。設計者は、集積度が高くコスト効率に優れたこれらのマイコンを使用することで、設計上のスケーラビリティとフレキシビリティを実現しながら、システムの性能要件を満たすことができます。
集中型制御アーキテクチャは、ペイロードの大きい産業用ロボットなどハイパワー自動化システムの性能と効率に関する設計要件を満たすことができますが、キャビネットから接続部の機械式モーターまでのケーブルと位置センサからアグリゲータまでのケーブルを追加する必要があります。これらの配線はコストの増加につながるだけでなく、摩耗するため、メンテナンスが必要です。
非集中型または分散型アーキテクチャ
非集中型または分散型アーキテクチャ (図 2) は、最近、電力要件の小さいシステムで人気が高まっており、協力ロボット (コボット) マニピュレータ向けの標準的なアプローチとなっています。
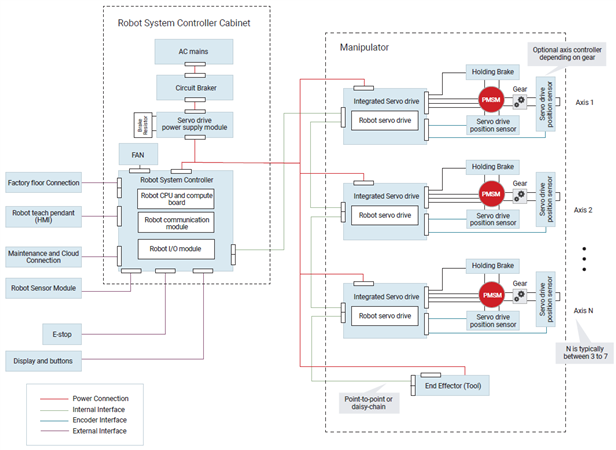
図 2:1 軸システム向けの非集中型モーター制御アーキテクチャのブロック図
非集中型アーキテクチャでは、ロボット内の各接続部に複数の 1 軸モーター ドライブを内蔵し、EtherCAT などのリアルタイム通信インターフェイスを介してそれらのモーター ドライブを接続、同期しています。各ドライブは通常、1 つの軸を制御し、特定の安全機能を局所的に処理します。そのため、各マイコンでは、リアルタイムの制御機能と通信機能、1 軸用のモーター制御ペリフェラル、3 つから 6 つの PWM チャネル、オンチップ SAR (逐次比較型) A/D コンバータ、またはデルタ・シグマ変調器入力が必要です。
こうしたアプリケーションでは、通常、位置センサがマイコンの隣にあるため、これらのマイコンには、位置センサからデータを読み取るためのデジタルまたはアナログ インターフェイスが必要です。このアーキテクチャでは、複数のマイコンが必要になりますが、電力バスと通信インターフェイスの間のケーブル配線が少なくて済むため、システム レベルでは大きなコスト削減につながります。F28P65x などの最新のリアルタイム マイコンには、必要なすべてのペリフェラルに加え、安全性ペリフェラルも内蔵されています。それにより、非集中型アーキテクチャに組み込まれる軸に対して、小型で高性能の 1 チップまたは 2 チップ・ソリューションを実現できます。
まとめ
ロボット分野では、特に人工知能対応システムに比べると、モーターは決して注目度の高いシステムではありませんが、工場の稼働状態を維持する「筋肉」に相当します。モーターは、最新の製造現場で最も重要な部分と考えることもでき、適切な制御デバイスの選択について、十分に時間をかけて検討する価値があります。また、これらのデバイスでは集積化が進んでおり、エッジ コンピューティングやワイヤレス コネクティビティなどの追加機能をモーター制御の設計に組み込むこともできます。