

 写真家ならば、芸術的観点から、被写体のブレは意図的なものだったと主張することはよくあるでしょう。しかし、画像ベースの自動検出、品質管理、および工場のオートメーションやロジスティクスにおけるコードの読み取りといった、マシン・ビジョンのユースケースでは、取得されたすべての画像には、最高の鮮明さが求められます。
写真家ならば、芸術的観点から、被写体のブレは意図的なものだったと主張することはよくあるでしょう。しかし、画像ベースの自動検出、品質管理、および工場のオートメーションやロジスティクスにおけるコードの読み取りといった、マシン・ビジョンのユースケースでは、取得されたすべての画像には、最高の鮮明さが求められます。
マシン・ビジョン向けの画像
それは、被写体の動きがあるかないかの問題ではなく、動きの速度(v)と画像取得に求められる鮮明さの問題です。
ピクセルのブレが1ピクセル以下というのは、動きを止めるための最適なアプローチです。これは、露出時間(tE)を短くするか、カメラのシャッター、ストロボの点灯時間を制御する、あるいはその両方の方法によって実現できます。等式1をご覧ください。
 ここで、tEは、ある大きさの視野(FOV)とピクセル数(NP)の1ピクセルのブレを達成するために必要な露出時間を示します。図1のように、FOVとNPは両方とも、物体の動きの速度(v)の方向にあります。
ここで、tEは、ある大きさの視野(FOV)とピクセル数(NP)の1ピクセルのブレを達成するために必要な露出時間を示します。図1のように、FOVとNPは両方とも、物体の動きの速度(v)の方向にあります。
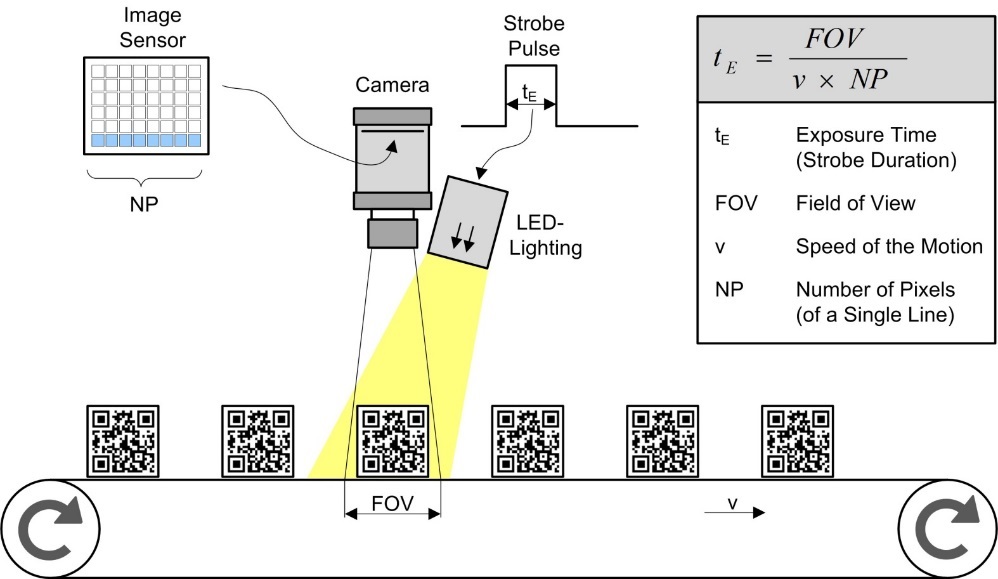 図1:マシン・ビジョンシステムの一般的なセットアップ:短いストロボパルスにより、コンベアベルト上の物体の動きが止まる
図1:マシン・ビジョンシステムの一般的なセットアップ:短いストロボパルスにより、コンベアベルト上の物体の動きが止まる
例を見てみましょう。
- FOV = 12.8mm
- 10mmの物体の画像を取得する必要がある
- コンベアベルトの速度は、1秒間につきv = 3メートル
- 画像センサの解像度、1280×1024ピクセルに基づき、NP = 1280
これらの値を等式1に代入すると、以下のようになります。
 3µs以下のtEでライトパルス(ストロボ)を生成する方法は、ユーザ次第ということになります。物体の移動速度がさらに速く、より短い露出時間が求められる用途もあるという点にご留意ください。
3µs以下のtEでライトパルス(ストロボ)を生成する方法は、ユーザ次第ということになります。物体の移動速度がさらに速く、より短い露出時間が求められる用途もあるという点にご留意ください。
テキサス・インスツルメンツ(TI)では、仕様を見極めるためにデザインのブレインストーミングを行い、最終的に、ハードウェアサンプルの文書を作成しました。ウィッシュリストの上位に挙げられたのは、発光ダイオード(LED)のストロボ間隔を1µsまで短縮して駆動する機能です。LEDは、プログラム可能な閉ループ制御の一定電流で駆動する必要がありました。さらに、ハイ・フレームレートのサポート、広い入力電圧範囲、およびトリガー・インターフェイスなどの、便利な機能もいくつか必要でした。最終的に、図2に示すようなマシン・ビジョン向けLEDライティング制御のリファレンス・デザインが完成しました。
 図2:マシン・ビジョン向けLEDライティング制御のリファレンス・デザイン(LEDがオンの状態)
図2:マシン・ビジョン向けLEDライティング制御のリファレンス・デザイン(LEDがオンの状態)
LEDライティング制御のリファレンス・デザインの特徴:
- 5台のハイパワーLEDによる列を駆動する機能
- 200mA~2.4AのLED電流
- 最大40Wのパルス電力
- LEDの連続またはストロボ作動
- ストロボ間隔は最小200ns、フレームレートは最大10kHz
- 15Wの入力電力を上限とする8V~36Vの電源入力
- 直流的に絶縁されたトリガーおよびUARTインターフェイス
- 外部利用のための絶縁された低電力5Vレール
リファレンス・デザインは、異なる機能を持つサブブロックに分割されます。TIはこの完全な機能セットを達成するために、通常とは異なるアプローチを複数導入しています。
※すべての商標はそれぞれの所有者に帰属します。
※上記の記事はこちらのBlog記事(2018年5月31日)より翻訳転載されました。
*ご質問はE2E Support Forumにお願い致します。