

相信各位搭乘電梯時,都會預期從某個樓層到下個樓層時能有順暢安全的搭乘經驗。搭乘電梯時,精確運動控制讓電梯能夠停在指定位置,並可進行減速以流暢地讓電梯完全停止。若缺乏精確運動控制,會導致電梯停在未對準地板的位置,造成電梯內人員感覺頭暈或不安全。
機器人、電腦數控機械和工廠自動化設備都需要來自伺服驅動器的精確位置控制 (許多情況下也需要精確速度控制),以正確製造產品並維持工作流程。
工業驅動器在許多方面都對精確運動控制十分重要,包括即時控制設計的所有三個基礎子系統:感測、處理及致動。在本文中,我將探討每個子系統的啟用技術範例。
感測
如果沒有精確位置和速度感測,就無法實現精確運動控制。感測可包含馬達轉軸角度位置和速度感測、或輸送機線性位置與速度感測。設計人員經常執行每次轉動有數百到數千插槽的增量光編碼器,以感測位置與速度。這些編碼器通常會透過正交編碼脈衝 (QEP) 與微控制器 (MCU) 相介接,因此需要 QEP 介接能力。
精確度非常高的絕對編碼器通常有很高的每次轉動插槽數,且皆被精確安裝,以提供絕對角度位置。感測的位置會轉為數位方式呈現,並依標準協定進行編碼,例如 Tamagawa 的 T-format 和 iC-Haus GmbH 的雙向序列同步 (BiSS) C。過去您需使用現場可程式設計邏輯閘陣列 (FPGA) 才能與此類編碼器介接,但現在擁有這種功能的微控制器 (MCU)已成為常態,如圖 1 所示。由於 T-format 和 BiSS C 協定通常與常用通訊埠或多數 MCU 上使用的序列周邊介面 (SPI)、通用非同步接收器發射器 (UART) 或控制器區域網路 (CAN) 等介面所支援不同,因此常需可自訂的邏輯區塊或專有處理單元。
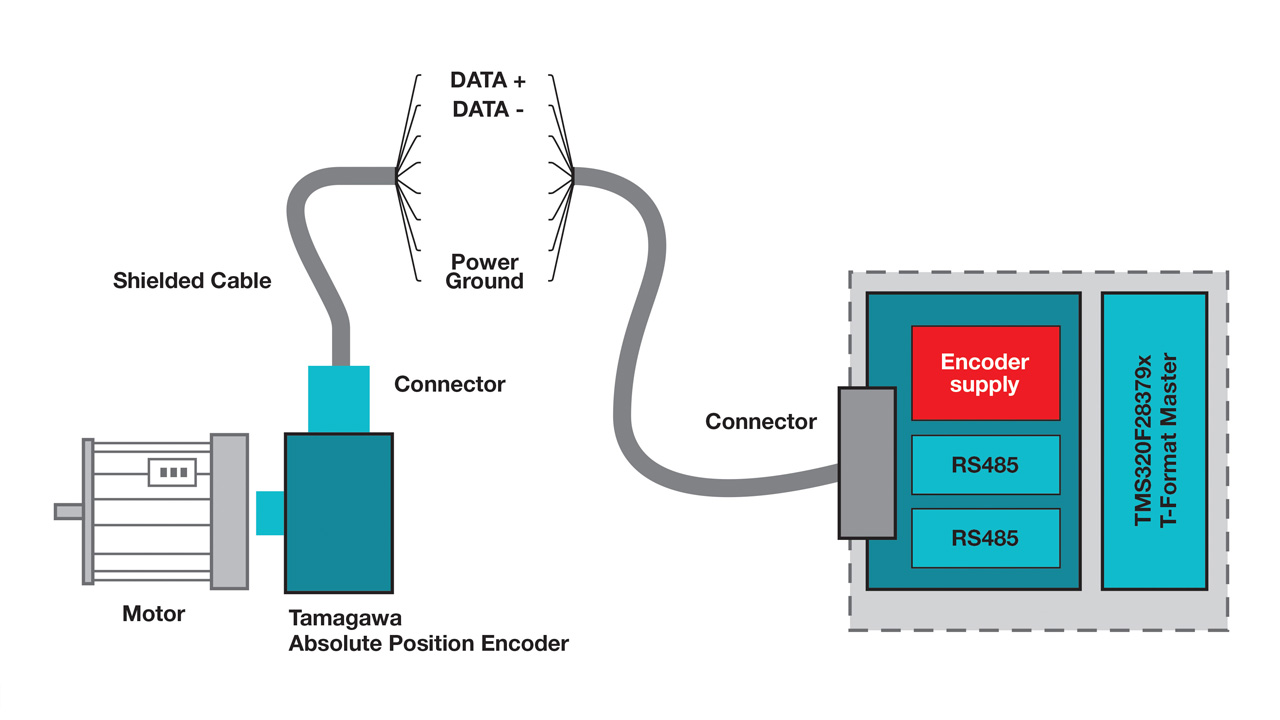
圖 1:絕對編碼器與 TI 控制 MCU 介接
絕對編碼器也可能以電磁或類似解析器的電路為基礎,需要準確的電子正弦訊號量測,因此精確運算放大器與電壓參考也非常重要。馬達和運動控制必須有精確的馬達電流和電壓感測,特別是採用無感測器控制的情況。常見的解決方案之一為使用隔離式或非隔離式放大器與驅動器的內嵌及逆變器腳低側感測,再搭配整合式低側電流感測。。
處理中
精確運動控制系統中的運動控制設定檔和演算法執行需要有高運算能力的 MCU。為提供必要的精確度和準確度,這類 MCU 通常採用 32 位元文字長度,並提供原生 64 位元浮點支援。由於演算法高度依賴數學三角函數、對數及指數,因此許多 MCU 都有硬體加速器。
考慮控制運動軸數或控制環路數,設計人員常需採用多個中央處理單元 (CPU) 架構或類似 CPU 的平行加速器。其他監控與通訊工作也是執行多個 CPU 的好理由。
作為即時控制應用,不管是收集電流、電壓、位置和速度量測,還是控制輸出更新,整個訊號鏈的總延遲都會直接影響控制性能,進而影響精確度。有些 MCU 有晶片內建類比比較器可以直接產生控制動作,大幅減少延遲和 CPU 負擔。其中,快速中斷回應與內容儲存和復原也很重要。
只有高處理能力是不夠的。運動控制 MCU 也必須具備 12 位元和 16 位元類比至數位轉換器、QEP 介面、高解析度邊緣、脈衝捕獲、脈衝寬度調變 (PWM) 輸出等常用控制周邊設備。此外,也需要執行自訂邏輯與時脈序列的能力。
為協助設計人員開始設計並快速進行調整,MCU 和馬達驅動器廠商提供馬達與運動控制演算法,其中包含無感測器觀測器和軟體庫等核心演算法,以及具備 GUI 可配置性的完整控制代碼。
圖 2 是工業驅動器控制 MCU 的概念圖說。
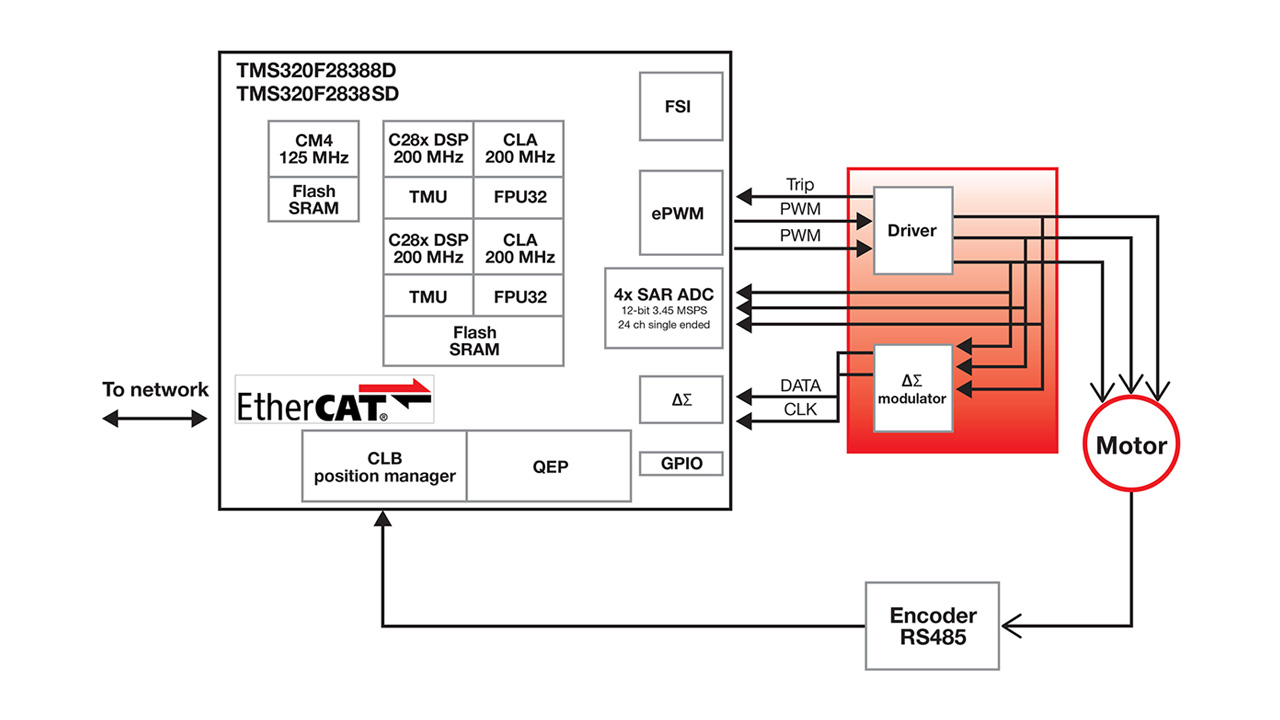
圖 2:工業驅動器的 MCU
致動
若想提供預期控制動作,就需要使用電力裝置與驅動器,其通常會採用 PWM 及代表動作的工作比。精確控制 PWM 脈衝非常重要,這代表驅動器必須提供必要的驅動強度並將時脈偏斜降到最低,電力裝置則需在精確的預期時間開啟和關閉。這類驅動器現在已很常見,並有過電流和過熱保護等其他功能。最新寬頻隙電力裝置可確保快速、精確的開啟和關閉時間。寬頻隙裝置的快速切換速度和低切換損耗也能實現快速控制環路速度,以提升穩定性和性能。
除了精確度外,許多應用也需要精巧的馬達控制設計,具備整合電流感測的必要驅動器及電力模組。
結論
精確運動控制是工業驅動器的關鍵。為實現精確運動控制,必須採用包含即時控制設計三個基礎子系統的技術解決方案,這三個子系統為:感測、處理及致動。
其他資源
- 請閱讀以下電子書進一步了解:「適用於工業馬達驅動器的 C2000
 MCU DesignDRIVE 解決方案。」
MCU DesignDRIVE 解決方案。」 - 下載透過快速序列介面 (FSI) 參考設計的分散式多軸伺服驅動器。
- 閱讀應用說明「多軸伺服控制的 FSI 頻寬最佳化。」
- 閱讀應用說明「TI Arm 核心上的最佳三角函數。」
- 查看技術文章「以多協定工業乙太網路系統簡化工廠自動化設計。」
- 閱讀應用說明「Sitara 處理器與 MCU 支援的工業通訊協定。」