

德州儀器作者: Kathrina Macalanda
如果您正在設計馬達驅動應用,以往您可能會依賴雙極接面電晶體 (BJT) 等多個離散元件來實作馬達控制。雖然這種方法通常較便宜,但它會增加整體元件數量並佔用更大的電路板空間,而且設計時間更長、複雜度也更高。此外,使用多個元件也可能會影響系統可靠性。
隨著應用變得越來越複雜、功能越來越強大、體積也越來越小,整合就變得至關重要。整合解決方案可以縮短設計時間、簡化採購複雜度並降低成本,同時還能確保馬達系統的可靠與高效率。
在本文中,我將比較不同的馬達控制實作形式 (從離散選項到完全整合選項),以便協助您找到適合您設計的方法。表 1 比較每個馬達控制選項的整合度。
|
|
控制 |
驅動器 |
FET |
|
離散 BJT |
|
|
|
|
閘極驅動器積體電路 (IC) |
|
X |
|
|
馬達驅動器 IC |
|
X |
X |
|
整合控制閘極驅動器 IC |
X |
X |
|
|
整合控制、閘極驅動器和場效應電晶體 (FET) IC |
X |
X |
X |
表 1:用於驅動馬達的整合度
採用離散方式進行馬達控制
圖 1 描繪一個控制單元,例如微控制器 (MCU),用於處理馬達狀態的回饋並傳送訊號來調節馬達的扭矩、位置和速度。閘極驅動器會將 MCU 的訊號放大,以便驅動馬達的金屬氧化半導體場效電晶體 (MOSFET)。

圖 1:基本馬達控制方塊圖
您可以使用 BJT 圖騰柱/推挽電路作為閘極驅動電路來驅動單一 MOSFET,如圖 2 所示。雖然此方法價格便宜且易於實作,但 BJT 圖騰柱電路需要大量元件並佔用許多電路板空間。此外,您必須複製這種離散電路,因為您需要多個 MOSFET 來驅動馬達,這會使所需的元件數量和電路板空間成倍數增加。
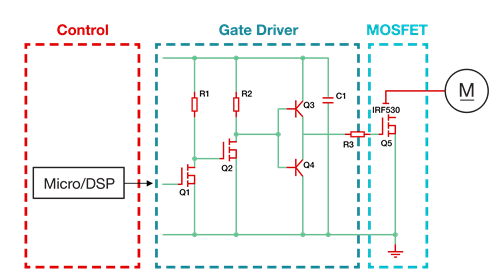
圖 2:採用離散 BJT 圖騰柱/推挽電路實作閘極驅動器方塊圖
第一個整合選項:閘極驅動器 IC
基本閘極驅動器 IC 將圖騰柱的功能整合到單一封裝中。最近的工藝技術創新使閘極驅動器 IC 與離散式 BJT 一樣經濟實惠。
選擇閘極驅動器 IC 時有幾個考慮因素,例如通道數量以及最適合馬達功率位準的電壓和電流能力,如圖 3 所示。
整合式閘極驅動器 IC 包括:
- 單通道閘極驅動器 (例如 TI 的 UCC21732) 通常用於驅動高側和低側高電壓 (>700 V) 電源開關 (例如絕緣閘雙極電晶體 (IGBT) 和碳化矽 (SiC) 的交流馬達。
- 雙通道半橋閘極驅動器 (例如 UCC27712) 用於驅動 IGBT 和 MOSFET 的 100 V 至 700 V 馬達
- 四通道全橋驅動器和六通道三相馬達閘極驅動器 (例如 DRV8329) 是專為低電壓 MOSFET (<60 V) DC 馬達設計
隨著馬達功率位準的變化,使用閘極驅動器可以保留先前的設計,只需要改變外部 FET 以適應新的電壓和電流位準。
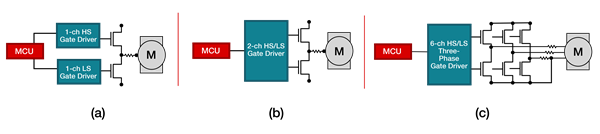
圖 3:驅動外部 FET 的閘極驅動器 IC 類型
閘極驅動器涵蓋基本功能 (例如用於防止交叉導通的欠電壓鎖定和聯鎖保護) 到進階功能 (例如用於電壓轉換速率控制和自動失效時間的智慧型閘極驅動)。深入瞭解「瞭解智慧閘極驅動」應用說明中的這些閘極驅動器。
以往是由以下外部元件設定電壓轉換速率:兩個源極和汲極電阻器 (用於限制 MOSFET 閘極的電流)、一個二極體 (用於單獨調整上升和下降速率),以及一個下拉電阻器。智慧閘極驅動省去這些元件,同時提供透過序列周邊介面調整轉換速率的彈性。
使用具有智慧閘極驅動的六通道驅動器可省去多達 24 個離散元件,進而節省電路板空間和物料清單 (BOM) 數量。在閘極驅動器中的其他保護和診斷功能將整合為一,包括電流感測、過電流和過熱保護、故障偵測甚至隔離,以進一步減少元件數量。
第二個整合選項:馬達驅動器 IC
包括閘極驅動器和整合 FET 的馬達驅動器 IC 非常適合低功率馬達系統 (<70 W),如圖 4 所示。馬達驅動器 IC 的佔位面積小於閘極驅動器;整合 FET 功率級可簡化設計電路圖和佈線圖。DRV8962 等馬達驅動器就像閘極驅動器 IC 一樣, 具有整合保護和診斷功能。
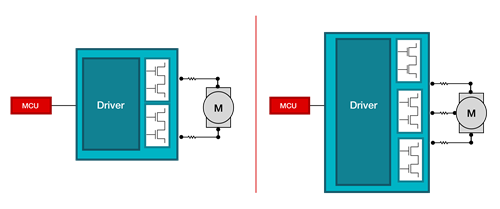
圖 4:具備整合 FET 的全橋三相馬達驅動器
選擇馬達驅動解決方案時,必須考慮內部 FET 的 RDS(ON),以及峰值電流和均方根電流。當考慮到內部 FET 的功耗時,也有必要執行熱計算。
第三個整合選項:整合控制閘極驅動器 IC
與前兩個選項不同,MCT8329A 等整合控制閘極驅動器 IC 不需要 MCU 進行馬達控制。這些 IC 仍然具有閘極驅動器功能、具有保護和診斷功能,同時整合無需 MCU 輔助的控制演算法,如圖 5 所示。
馬達換向演算法的實作 (無論是梯形、正弦或是磁場定向控制) 都可能很複雜。整合控制閘極驅動器 IC 提供無程式碼解決方案,可在內部處理換向演算法,進而縮短設計時間並簡化編碼、偵錯和測試的複雜度。
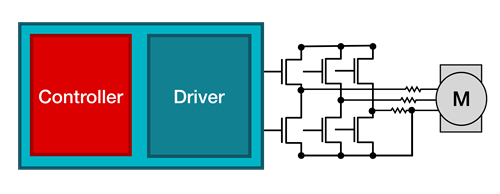
圖 5:整合控制三相閘極驅動器
無論是否透過有感測器或無感測器控制,整合控制閘極驅動器 IC 在實作馬達換向時也提供彈性。有感測器方法允許使用外部霍爾效應感測器來偵測轉子位置;這些 IC 可以獲取霍爾效應感測器輸入並利用馬達控制演算法高效安靜地驅動馬達。相比之下,無感測器實作形式則移除外部霍爾效應感測器以減少電路板空間和 BOM。無感測器整合控制閘極驅動器 IC 透過整合電流感測來測量反電動勢 (back-EMF) 電壓,並在內部計算馬達位置。
第四個整合選項:整合控制、閘極驅動器和 FET IC
最後一個整合選項通常稱為「完全整合」,如圖 6 所示。整合控制、閘極驅動器和 FET IC (例如 MCF8315A) 在單一晶片中整合無程式碼控制功能、具有保護和診斷功能的驅動器以及 FET,所佔用的電路板空間最少,BOM 最低。此項設計與馬達驅動器 IC 選項類似,整合控制、閘極驅動器和 FET IC 的解決方案將受到內部 FET 功能的限制,因此需要進行電流和熱計算。
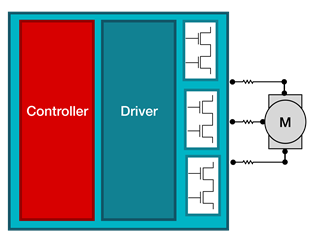
圖 6:完全整合 - 馬達控制加驅動器和 FET
結論
這些不同等級的整合 IC 不僅可以滿足馬達的功率位準需求,還可以縮短設計時間、降低成本和簡化複雜度。整合裝置還可以解決家電中的噪音,以及工廠自動化和機器人技術中的精確控制等挑戰。
其他資源:
- 閱讀技術文章:「如何在不斷成長的 HEV/EV 市場中實現最佳車用暖通空調設計」。
閱讀技術文章:「如何在工業驅動器中實現精確運動控制