Other Parts Discussed in Thread: OPA387, , TINA-TI
I have a design that includes a high gain, low frequency amplifier for a low level, high impedance source. The source impedance is 1MOhm and the input level is several microvolts. The bandwidth of the amplifier can be 1Hz or less as it will be amplifying signals that can be observed in real time. and the gain needs to be at least 150. Offsets can be trimmed as part of the operating procedure. So, while a low absolute amplitude of offsets is useful, the important thing is the drift with temperature and the random wander. I am aiming for around 0.1 microvolts per degree temperature sensitivity.
I have been looking at two amplifiers, the LMP2021 and the OPA387. These have excellent low level offset voltage and drift. Also, the 1/f noise of the OPA387 should meet my requirements and that of the LMP2021 comes close enough that I may be able to use it.
The problem is understanding the effect of input bias current in these amplifiers. A drift of 0.1pA per degree into 1MOhm would result in the limit I have set of 0.1 microvolts per degree. The data-sheets don't give clear information on whether this can be achieved.
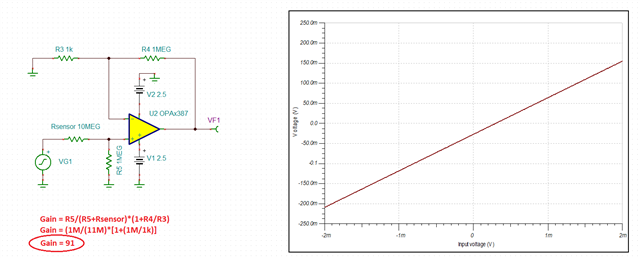
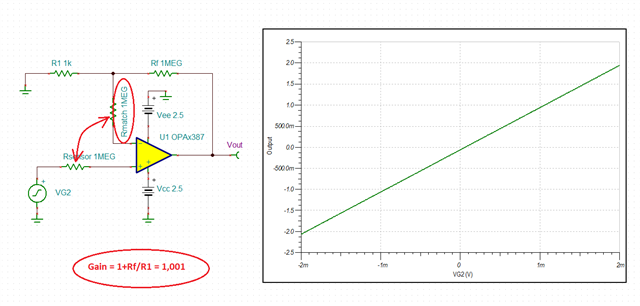
The OPA387 data-sheet suggests the use of lower impedances but this isn't an option. It also suggests matching the impedances seen by the two inputs. However this would result in a feedback resistor of 150MOhm for the gain of 150. Would that achieve the desired result?
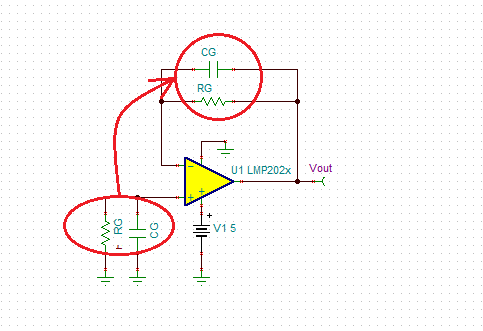
The LMP2021 data-sheet says quite a lot on the matter but isn't clear about how to use the information. An example is given in Section 8.1.3 for reducing the bias currents for a 1GOhm input resistor in a non-inverting amplifier. It says, "Figure 41 can be used to extrapolate capacitor values for other sensor resistances. For this purpose, the total impedance seen by the input of the LMP202x needs to be calculated based on Figure 41. By knowing the value of RG, one can calculate the corresponding CG which minimizes the non-inverting input bias current, positive bias current, value." However, it gives no indication of how to actually do this. How do I use this figure to extrapolate values for my design? Also, if a very low bias current is achieved does that imply low drift with temperature? Section 8.1.4 then tends to contradict the previous section by suggesting that, rather than choosing an optimum value for capacitance, the bigger the better.
Could you please provide some clarification on this. It these amplifiers are not suitable, can you suggest something better. I have found amplifiers that have good, low bias current drift with temperature but they have too high a value of 1/f noise.