- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
Original question:

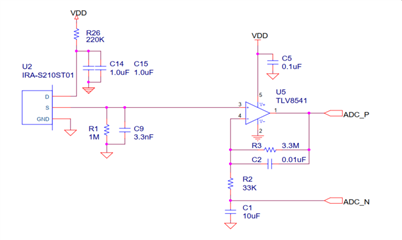
Hi I'm using a circuit very similar to the one below. U5 is a TLV522 (half), U2 is a D203s standard PIR sensor. The output is fed into a differential input ADC (uC).
The problem is that the output signal shows slow excursions (multi-second) of multiple mV's on the output around the zero point. I.e. when the PIR is covered, there still is signal, but it does not seem to be noise.
The amplifier does stabilize on the bias (DC) voltage of the PIR sensor, but seems to wander (oscillate?) around it sometimes.
It does not seem to be completely stable somehow. Have been playing around with the values C1/C2/R2/R3, but I don't seem to get things right. I recall a former build where this circuit performed really well. Am I overlooking something? Are oscillations possible in such circuit, or should it be inherently stable?