Tool/software:
Hello,
I am using AM263P LP & BOOSTXL_3PhGANINV driver board and Linix 45ZWN24-40 BLDC Motor. I have successfully passed the first 3 levels in universal motor control example.
in DMC_LEVEL_4,
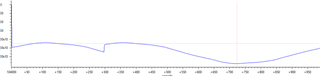
First, The motor rotates in accordance with the reference speed. After 2-3 seconds, the motor speed decreased according to the reference speed.
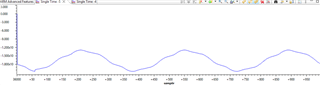
Also, the speed changes continously with a constant pattern.
How should I proceed?
Regards,
Burak