Hi
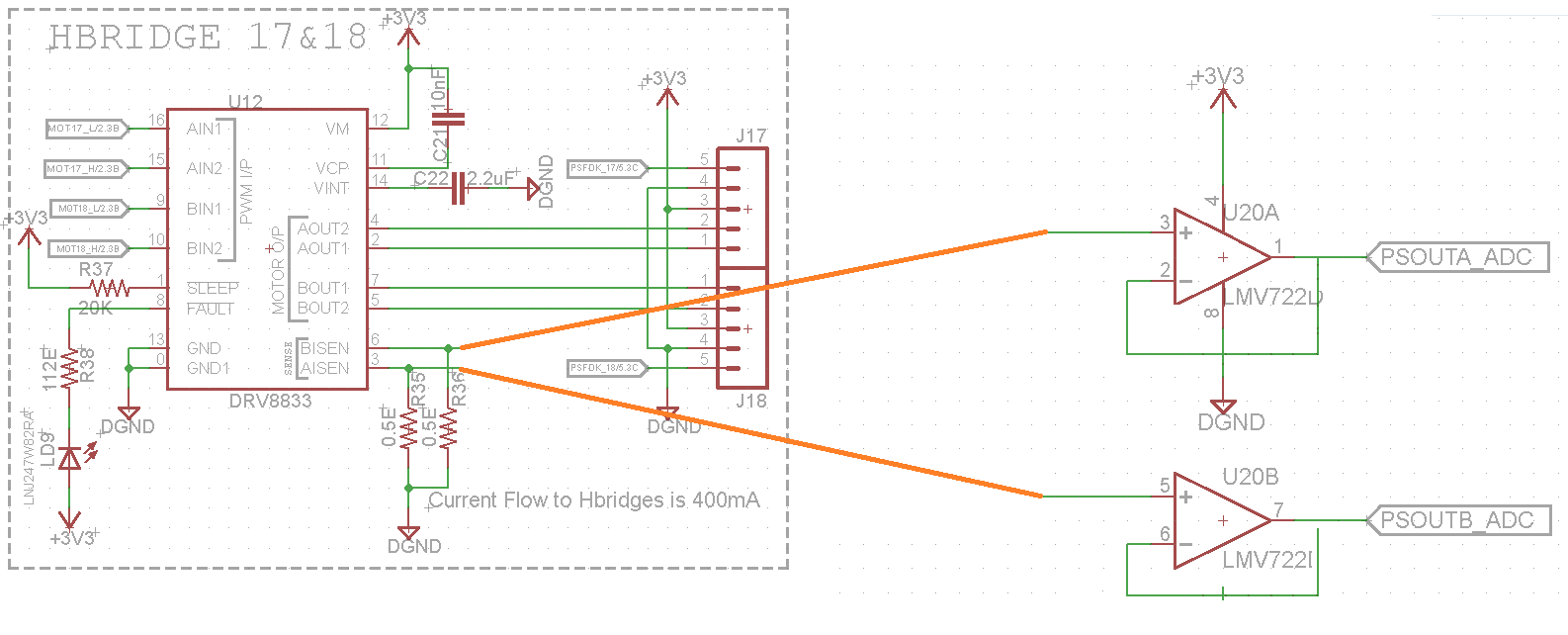
I need to measure the current sensing for Hdridge driver, in my design iam using DRV8833, the Hbridge driver have current sensing pin. so iam using current sense amplifier to measure the current.
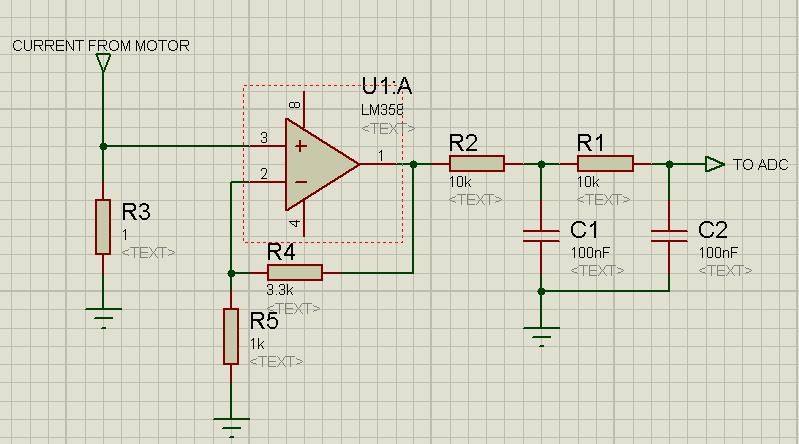
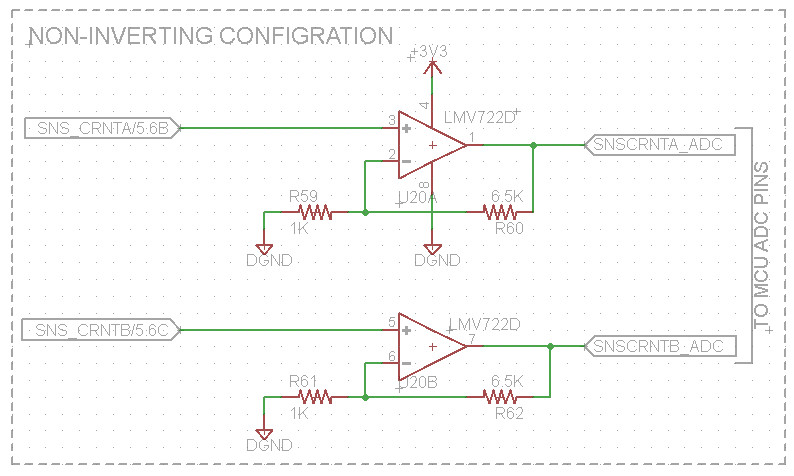
please find below image of my Amplifier circuit, here iam using LMV722 amplifier to measure the current thru shunt resistor (0 to 250mV), so as per the voltage differences we can calculate the current flow thru the motor
The output of the amplifier is connected to ADC pins of the Microcontroller. I would like to request your thoughts on the design. please find below image.

Regards
Anil