
Hello,
I have a differential signal which alternates between 0 to 5V and I want to measure it with an ADC
I have three choices to do it:
1- using two single-ended op-amps and a differential ADC.
2- using a fully differential op-amp and a differential ADC.
3- using a single-ended op-amp to change differential to single-ended and single-ended ADC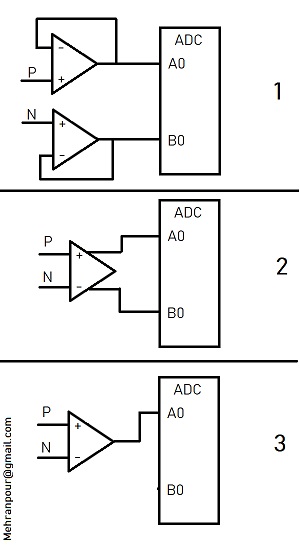
Which one is better?
I have to use an op-amp with a gain anyway since my ADC is 3.3V and the signal is 5V.
I would say the second configuration is the best but it is costly.
Regarding the common-mode rejection 2 and 3 removes that on the analog level but if I use two single-ended I will only rely on ADC common-mode rejection on the digital level.
I already check the application report of Texas Instrument about fully differential amplifiers so my questions arose from there.
Please help me in this regard Thanks in advance.

-
Ask a related question
What is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.



