Hello everyone.
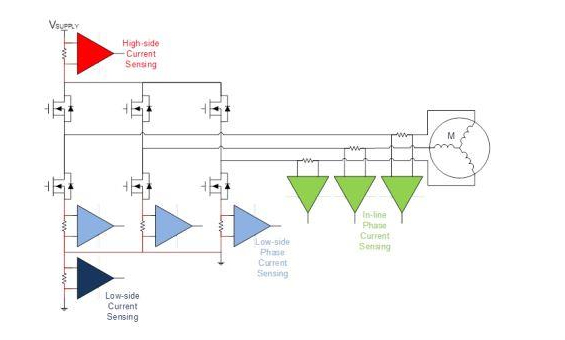
I am designing a current sensing circuit for PSMS motor control using the low side Phase current sensing method. The light blue OpAmps in the picture below.
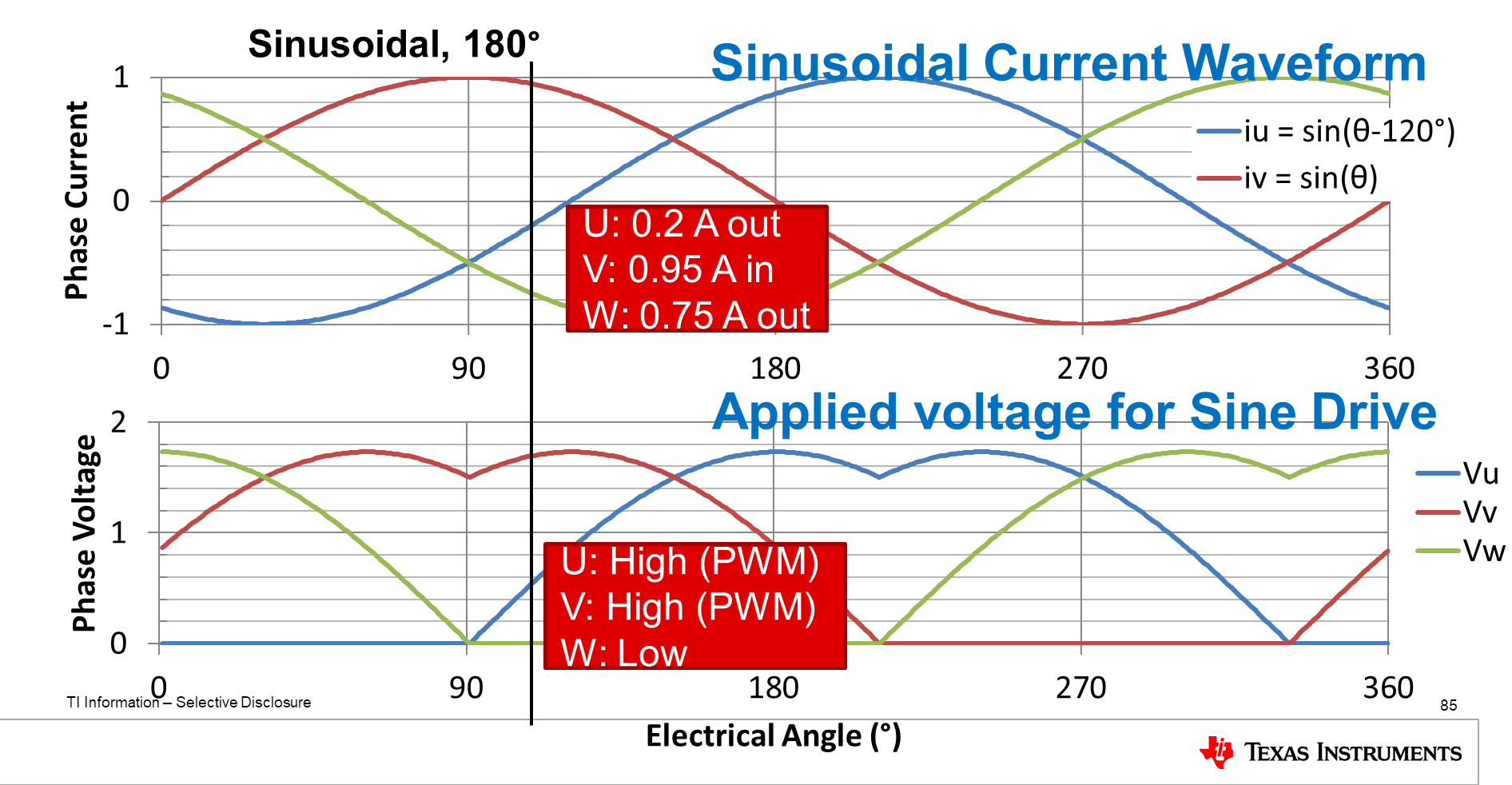
One thing I cannot understand. The three branches current can not be measure for all the status. Even use the Kirchhoff"s law, still only one phase current can be measured when the switch status is 110, 101, and 011. Which 1 is for high side open and 0 is for low side open. It is easy to understand in status 001, 010 and 100. Two branches can be measured and the current of the third branch can be calculated with the Kirchhoffs law.
For example with the status 101. Only the middle branch current can be measured . The other two branches are still unknow in this status. Could someone help me with this? Thanks a lot! Best regards!