I wish to control the EVM board on a Linux system.
First, is there any example code to control the board over Linux?
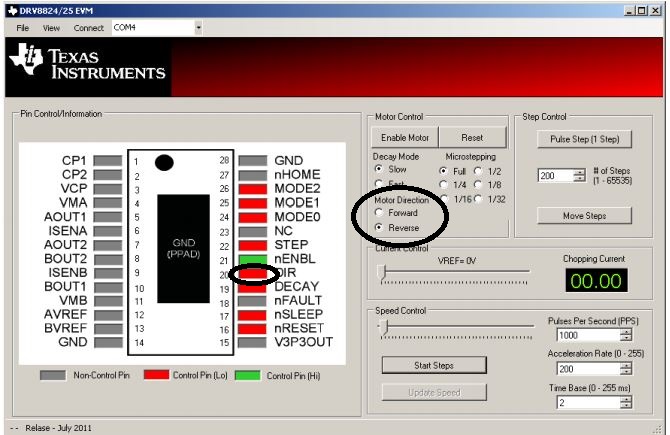
If not, AppDeff.h in the firmware gives the opcodes, which I believe I send to the USB port. What is the boards port? Or is it assigned at runtime? I can see START_STEPPER, STOP_STEPPER< STEPPER_SPEED, and MOVE_STEPS. I do not see DIR. Do I set that using the GPIO?
The DRV8825 is fed through P4.4/TB4. Do I sues TBCCTL4 as a GPIO?
Thanks
Ralph