Other Parts Discussed in Thread: LMK61E2,
Hi team,
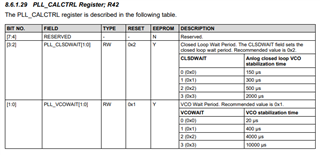
What is the function of these register bits (SWR2PLL, AUTOSTART and ENCAL)? How to use them?
Does both the AUTOSTART bit and the ENCAL bit have a function to trigger PLL Lock?
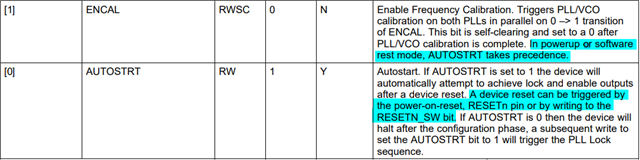
For ENCAL bit, what is software rest mode?
Device does not have RESETn pin and RESETN_SW bit, how do user use the AUTOSTRT bit?
Could you lease leave your comments? Thanks in advance.
Best Regards,
Amy Luo