


Other Parts Discussed in Thread: ADS8688
Tool/software:
Hope you guys are doing well
I would like to ask about some help, I needed to make data acquisition with ADS8698 and since I am very new to SPI I don't understand what exactly I am doing wrong
please help with this.
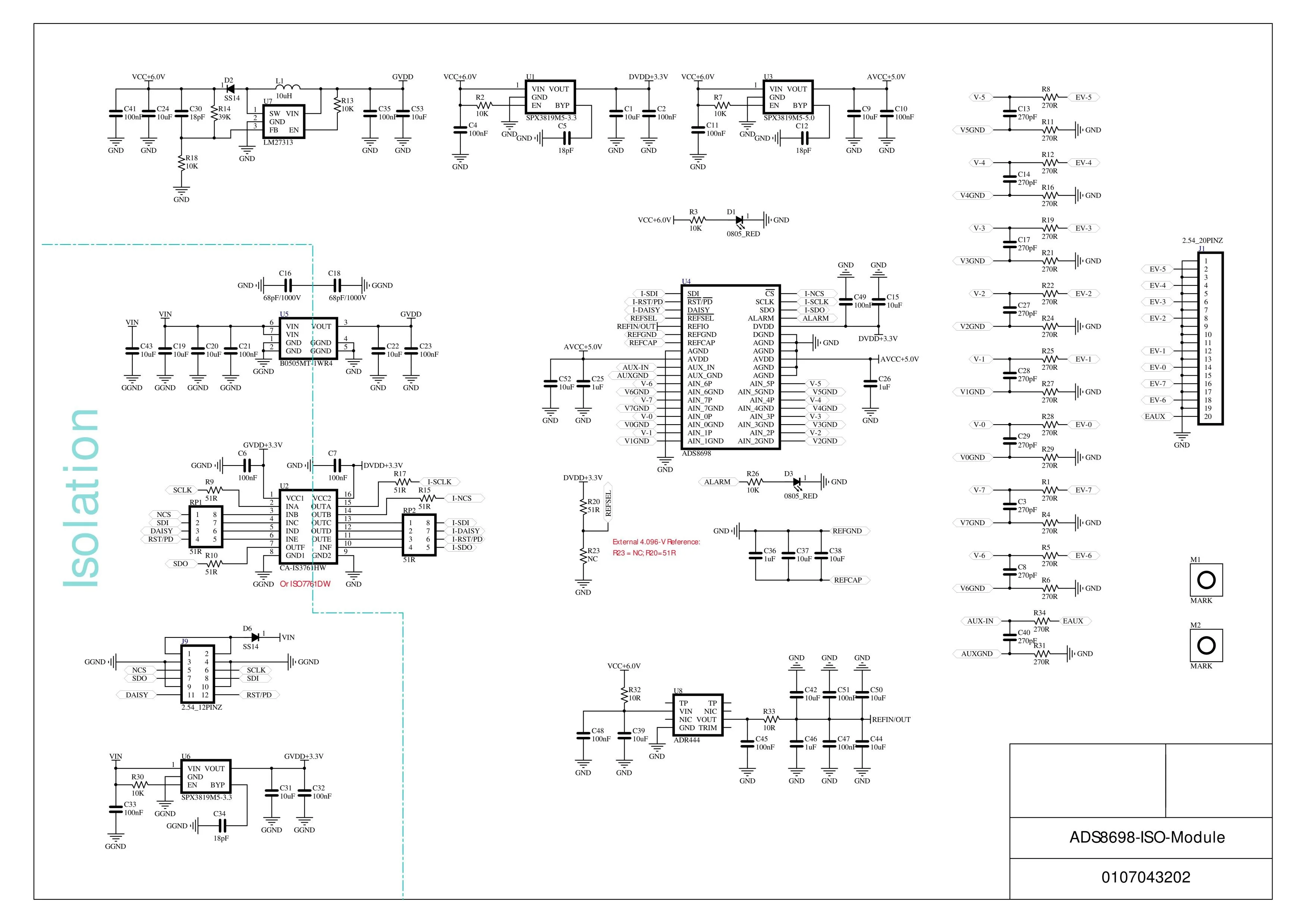
I have following board with ADS8698
https://www.aliexpress.com/item/1005006570383341.html
ADS8698 datasheet
https://www.ti.com/lit/ds/symlink/ads8698.pdf?ts=1730097926835&ref_url=https%253A%252F%252Fwww.ti.com%252Fproduct%252FADS8698
I am connected SPI pins and Potentiometer to V on Raspi 5V and GND on Raspi GND and Middle pint to AIN0
Board VIN => 5V raspi
Board GND => GND raspi
following is my code and thing is that I am getting same value from adc if I connect input to AIN0 or not and even if I just read response just after RST command I still get same value when I print adc_val = 255
Also is it correct that I need to convert adc value to voltage as following?
# config.py --------------------------------------------------------------- import time import RPi.GPIO as GPIO import spidev RST_PIN = 25 CS_PIN = 8 SPI = spidev.SpiDev() SPI.open(0, 0) def digital_write(pin, value): GPIO.output(pin, value) def delay_ns(ns): time.sleep(ns * 1e-9) def spi_writebyte(data): SPI.writebytes(data) def spi_readbytes(reg): return SPI.readbytes(reg) def module_init(): GPIO.setmode(GPIO.BCM) print(1) GPIO.setwarnings(False) print(2) GPIO.setup(RST_PIN, GPIO.OUT) print(3) GPIO.setup(CS_PIN, GPIO.OUT) SPI.max_speed_hz = 18_000_000 #18MHz SPI.mode = 1 return 0 # End Config
# ads.py ---------------------------------------------------------------
import config
import RPi.GPIO as GPIO
CMD_REG = {
'NO_OP' : 0x0000, # Continue operation in previous mode
'STDBY' : 0x8200, # Device is placed into standby mode
'PWR_DN' : 0x8300, # Device is powered down
'RST' : 0x8500, # Program register is reset to default
'AUTO_RST' : 0xA000, # Auto mode enabled following a reset
'MAN_Ch_0' : 0xC000, # Channel 0 input is selected
'MAN_Ch_1' : 0xC400, # Channel 1 input is selected
'MAN_Ch_2' : 0xC800, # Channel 2 input is selected
'MAN_Ch_3' : 0xCC00, # Channel 3 input is selected
'MAN_Ch_4' : 0xD000, # Channel 4 input is selected
'MAN_Ch_5' : 0xD400, # Channel 5 input is selected
'MAN_Ch_6' : 0xD800, # Channel 6 input is selected
'MAN_Ch_7' : 0xDC00, # Channel 7 input is selected
'MAN_AUX' : 0xE000 # AUX channel input is selected
}
rest = [ 0x85, 0x00]
class ADS:
def __init__(self):
self.rst_pin = config.RST_PIN
self.cs_pin = config.CS_PIN
def ADS_reset(self):
config.digital_write(self.rst_pin, GPIO.HIGH)
config.delay_ns(100)
config.digital_write(self.rst_pin, GPIO.LOW)
config.delay_ns(100)
# config.spi_writebyte(rest)
config.spi_writebyte([CMD_REG['RST']] )
config.digital_write(self.rst_pin, GPIO.HIGH)
# config.delay_ns(100)
def ADS_Write_Cmd(self, cmd_reg):
config.digital_write(self.cs_pin, GPIO.LOW)
config.spi_writebyte([cmd_reg] )
config.digital_write(self.cs_pin, GPIO.HIGH)
def ADS_Read_ADC_Data(self):
config.digital_write(self.cs_pin, GPIO.LOW)
config.spi_writebyte([CMD_REG['NO_OP']])
buf = config.spi_readbytes(3)
config.digital_write(self.cs_pin, GPIO.HIGH)
read = (buf[0]<<16) & 0xff0000
read |= (buf[1]<<8) & 0xff00
read |= (buf[2]) & 0xff
return read
def ADS_init(self):
if (config.module_init() != 0):
return -1
self.ADS_reset()
return
# End ADS# main.py ---------------------------------------------------------------
import ADS
import RPi.GPIO as GPIO
try:
ADC = ADS.ADS()
ADC.ADS_init()
# ADC.ADS_Write_Cmd(ADS.CMD_REG['MAN_Ch_0'])
# result = []
while(1):
adc_val = ADC.ADS_Read_ADC_Data()
print("ADC = %lf "%(adc_val * 10.24 / (2 ** 18)))
print(adc_val )
except :
GPIO.cleanup()
print ("\r\nProgram end ")
exit()
# End Main



{kind=link}