- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
I use a CC2530 board connect with the ADS1299EEGFE-PDK daughter board.
I read chipID and got correct value.
Then I I wrote and read configs according to datasheet page 62(Setting the Device for Basic Data Capture )
In fact,I read some previous posts. According the post of Ivan Rock.(ADS1298: Run Test Signal and measure heart rate using two electrodes)
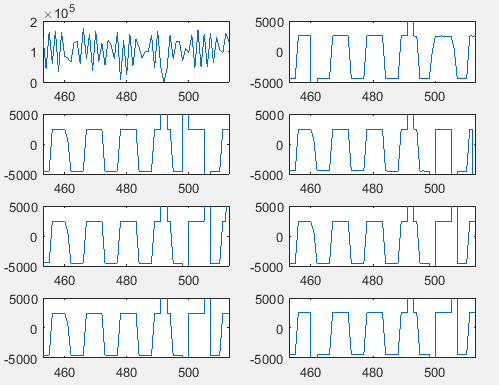
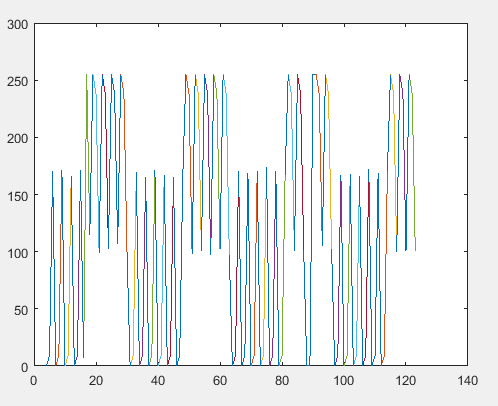
I read 27 bytes from buffer a lot of times,and form a [n x 8] matrix to store the signal.And I use the matlab test the internally test signal.
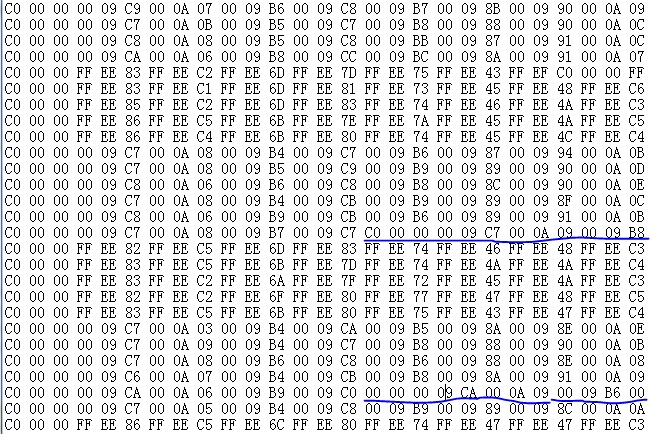
Here is my data and the image of a channel. The image looks like square-wave? AM I WRONG?
C0 00 00 00 09 C1 00 09 FF 00 09 AF 00 09 C2 00 09 B0 00 09 83 00 09 84 00 0A 03
C0 00 00 00 09 C1 00 0B 80 00 00 00 13 86 00 13 FE 00 13 58 00 13 84 00 13 52 00
C0 00 00 00 09 C1 00 09 FF 00 09 AA 00 09 C3 00 09 AF 00 09 83 00 09 88 00 0A 06
C0 00 00 00 09 BE 00 09 FE 00 09 AA 00 09 C0 00 09 AC 00 09 81 00 09 88 00 0A 00
C0 00 00 00 09 C0 00 09 FC 00 09 AE 00 09 C1 00 09 AD 00 09 7F 00 09 89 00 0A 03
C0 00 00 FF EE 7C FF EE BA FF EE 67 FF EE 79 FF EE 66 FF EE 3C FF EE 40 FF EE BB
C0 00 00 FF EE 7E FF EE BF FF EE 68 FF EE 7A FF EE 6A FF EE 3E FF EE 43 FF EE BD
C0 00 00 FF EE 77 FF EE BA FF EE 64 FF EE 79 FF EE 68 FF EE 3C FF EE 40 FF EE BB
C0 00 00 FF EE 7C FF EE B6 FF EE 63 FF EE 74 FF EE 67 FF EE 3B FF EE 40 FF EE BB
C0 00 00 FF EE 78 FF EE B9 FF EE 67 FF EE 77 FF EE 67 FF EE 3D FF EE 42 FF EE BB
C0 00 00 FF EE 79 FF EE BA FF EE 64 FF EE 77 FF EE 69 FF EE 3B FF EE 3C FF EE B9
C0 00 00 00 09 BE 00 09 FC 00 09 B1 00 09 BE 00 09 AE 00 09 81 00 09 83 00 0A 00
C0 00 00 00 09 BD 00 0A 01 00 09 AF 00 09 C1 00 09 AF 00 09 82 00 09 89 00 0A 03
C0 00 00 00 09 C0 00 0A 01 00 09 B1 00 09 C1 00 09 B1 00 09 85 00 09 87 00 0A 03
C0 00 00 00 09 C0 00 0A 01 00 09 AD 00 09 C0 00 09 AC 00 09 82 00 09 86 00 0A 08
C0 00 00 00 09 C0 00 09 FF 00 09 AD 00 09 C1 00 09 B1 00 09 83 00 09 8B 00 0A 01
C0 00 00 FF F3 04 FF F3 44 FF F2 F0 FF F2 FE FF F2 F4 FF F2 CA FF F2 CB FF F3 42
C0 00 00 FF EE 7F FF EE BD FF EE 66 FF EE C0 00 00 FF EE 7E FF EE BC FF EE 65 FF