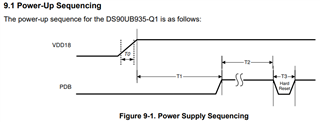
Part Number: DS90UB935-Q1
Other Parts Discussed in Thread: DS90UB962-Q1,
Hello:
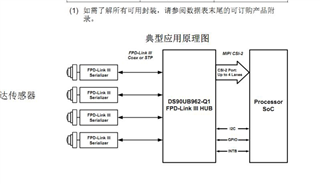
The professional flat panel project has four cameras. The four cameras use TI chips ds90ub935-q1 and ds90ub962-q1
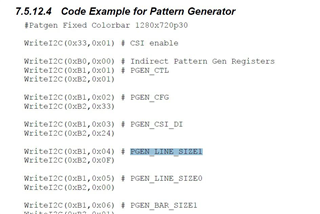
Now the Ti chips need to write registers, and customer wants TI to provide relevant parameter configurations to make the camera work,Please help!!!