



Hi,
Please find below CANH-GND and CANL-GND and CANH-CANL in a system with only 1 node and no CAN termination resistor (Schematic below). Vcc here is 5V and Vio is 3.3V. Please suggest what causes the drive strength to be so low. This is noticed with a few products and not all. As soon as we connect another node (CAN Analyzer) to the system, the signal improves, and communication is established. With few other types of nodes however, the communication doesn't get established (haven't checked this waveform yet).

Above is CANH-GND

Above is CANL-GND

Above is CANH-CANL
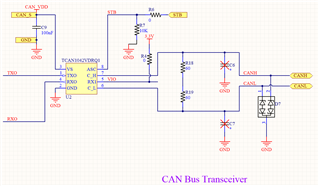
Above is schematic, R18, R19 not populated.


