Part Number: SN65DPHY440SS
We are using the camera module OV5640 in our design with a cable length of approximately 7 inches. To support this interface, we have incorporated the SN65DPHY440SSRHRT retimer IC.
During testing, we observed that out of 10 assembled devices, 7 were not working. On these non-functional units, we measured the waveforms on the data lines of the board and observed flat (inactive) signals across all lines.
We have thoroughly inspected the soldering from all sides and did not find any issues. Additionally, we experimented with different termination resistor values (10 ohms, 22ohms, and 33ohms), but the behavior remained unchanged. we have tested the same camera module works in other device to confirm the camera is working. also we have tried diffrent values on config lines as per the table given in the schematic.
For further analysis, the relevant waveform captures and schematic images have been compiled in the attached document. The document includes:
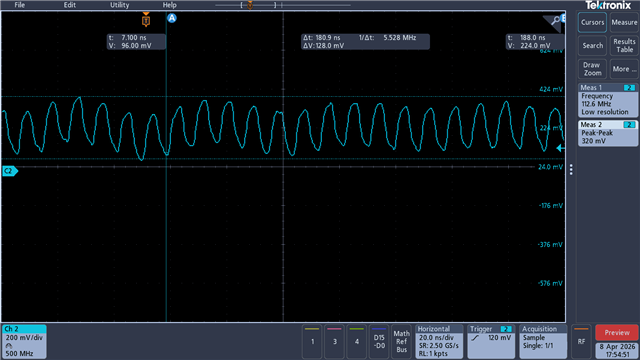
- Waveforms of the data lines on a non-working board
- Waveforms of the data lines on a working board
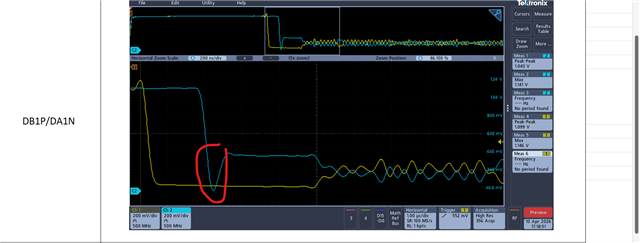
- Waveforms of the reset line on the non-working board
All images are included in the attached document for reference.SN65DPHY440 Retimer Not Passing MIPI Data – Flat Line Issue.docx