A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
TCAN1042H-Q1: The power rating needed for the termination resistor ?
I have a general explanation of the process for choosing this rating here, but I'll summarize it in this thread to talk over some CAN-specific things.
The system designer will have to choose the power ratings of the termination resistors in accordance with the requirements of the system. For instance, if the system only requires ratings to account for typical operation, the maximum differential between CANH and CANL will be Vcc. Assuming worst case Vcc = 5.5V and maximum Vod is achieved, the current through a 120-ohm path would be 5.5V / 120-ohm ~= 50mA. This is a pretty extreme case as the driven differential will be much smaller in most cases. However, if the system needs to account for fault conditions, the rating may be higher to avoid damage under non-ideal conditions. For example, let's say that the CAN bus will need to tolerate a CANH short to Vsup (battery voltage) of 12V. In this scenario, if the transceiver is driving CANL to ground potential, there will be a 12V differential between CANH and CANL. This would cause the current through the same 120-ohm path to be around twice as high ~= 100mA*. It's also worth noting that such a state will only persist until the CAN network recognizes the fault and ceases communication attempts, so prolonged dissipation of this power is not required.
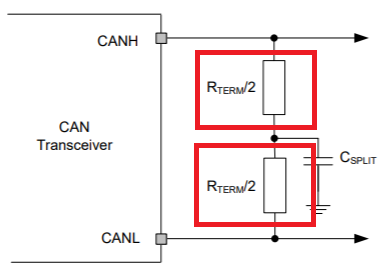
Common values we see for split termination are between 1/4W and 1/2W. Single resistor termination will need to dissipate twice the amount of power. High reliability or high voltage systems may opt for greater power ratings to increase the overall system robustness.
*Note I'm ignoring the short-circuit current limit of the CAN driver because I assume that multiple transceivers may be driving the bus simultaneously.