Part Number: TXB0304
Other Parts Discussed in Thread: TXU0304, TXB0104
Hi team,
I have two questions to confirm:
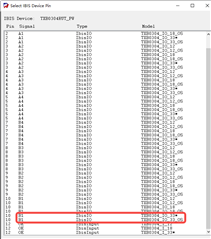
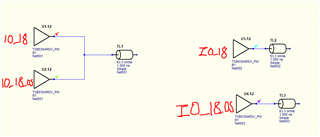
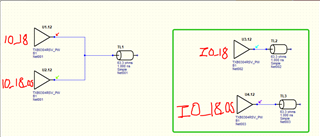
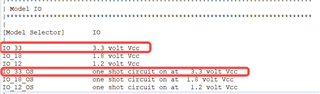
1. What are the specific differences between IO_33 and IO_33_OS in the TXB0304 IBIS model? How do you configure two different outputs?
2. Do TXB0304 and TXU0304 have the same architecture for SPI signals, and can the TXU0304 IBIS model be used instead of the TXB0304 model during simulation?
Many thanks.