Part Number: TMS570LC4357
Other Parts Discussed in Thread: HALCOGEN
Hello,
We have a project in which we are implementing a CAN interface. The protocol for this interface is based on the CANopen protocol concepts of PDOs, SDOs, etc. We have four TX PDOs which I have set up in HALCoGen as four separate TX message boxes with their respective IDs. The protocol requires that the device responds to an RTR frame received on TX PDO1 by sending all four TX PDOs.
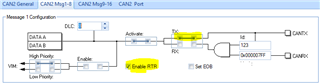
However, I have noticed RTR is handled automatically by the CAN module upon receiving the RTR and no interrupt is triggered by the received remote frame. Is there any way to disable this automatic response and handle the response in our code?
Thank you.