Part Number: RM57L843
Other Parts Discussed in Thread: HALCOGEN
Hi team,
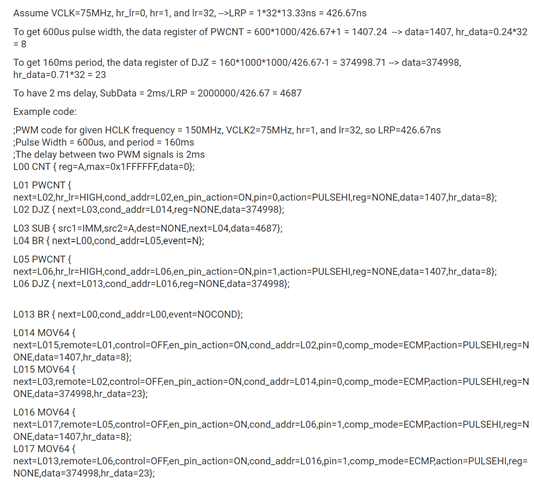
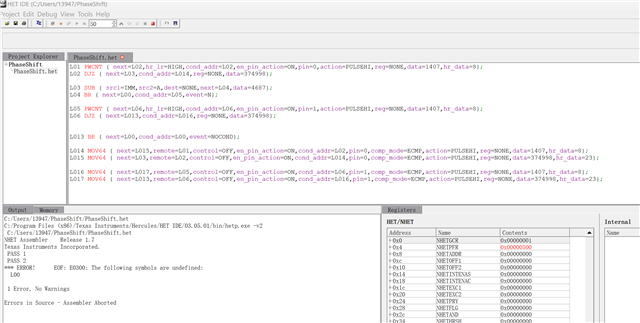
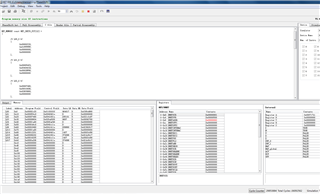
The N2HET module can generate pulse signals with different duty cycles, the customer would like to know how can different phase shift be applied to these pulse signals?
Thanks.
Best Regards,
Cherry