Part Number: TM4C1294NCPDT
Other Parts Discussed in Thread: IWR1642, AWR1642, TIDEP-0090
Hello,everyone! I think i need you help.
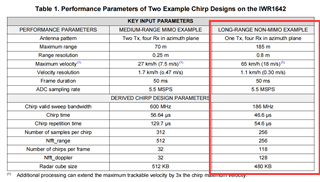
Because of the test needs, it is hoped that the radar can have a better detection accuracy at 80-90 meters and can observe the vehicle parking.
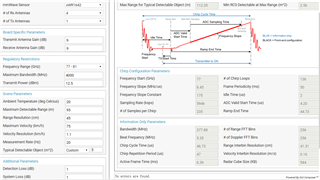
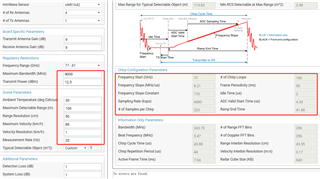
For this reason, I set a file referring to mmWave Sensing Estimator, as shown below
sensorStop
flushCfg
dfeDataOutputMode 1
channelCfg 15 1 0
adcCfg 2 1
adcbufCfg 0 1 1 1
profileCfg 0 77 2 4.20 41.88 0 0 8.21 1 223 6080 0 0 48
chirpCfg 0 0 0 0 0 0 0 1
frameCfg 0 0 120 0 50 1 0
lowPower 0 1
guiMonitor 1 0 0 0
cfarCfg 4 12 2 16 8 4 0 63 63 0 1
doaCfg 3 0 1047 3 600 10 100
trackingCfg 1 0 250 1 0 0 0 90
compRangeBiasAndRxChanPhase -0.0438848 0.12320 -0.62793 0.08932 -0.50342 -0.03458 -0.58853 0.06812 -0.69101 -0.79391 -0.60803 -0.63580 -0.45255 -0.70901 -0.26627 -0.73044 -0.46078
sensorStart
With this configuration file, my radar can track vehicles far away from the radar, with a maximum tracking distance of 113 meters. However, the first position where a vehicle close to the radar can be identified is 90 meters. Theoretically, it should be able to appear from 100 meters. Why?
So I have the following questions:
【1】 What's wrong with my settings?
【2】 Can you ask if there is a reference document for the description and setting of all the parameters of the cfg file?
【3】 With regard to increasing the number of point clouds at 80-90 meters, in addition to modifying the above files, what other relevant parameters have an impact on the detection effect
I really hope to get help from anyone, and I'm very grateful!
Regards,
ctc