Part Number: LP-MSPM0G3507
Other Parts Discussed in Thread: LVSERVOMTR
Tool/software:
Hello,
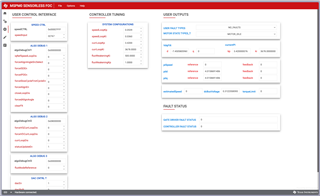
Is there a new tuning guide for the latest MSPM0 Sensorless FOC GUI?
https://dev.ti.com/gallery/view/TIMSPGC/MSPM0G-SENSORLESS_FOC/ver/2.0.0/
It looks like the linked tuning guide is for a different version of the GUI. I'm currently using the DRV8323RS boosterpack and the LVSERVOMTR which should be what's been tuned already in the system. I have everything powered up and there are no faults, but when I set a speed reference the motor doesn't start spinning. If I try to set the GUI motor state to something like "MOTOR_ALIGN", it goes right back to MOTOR_IDLE.
This GUI is definitely not user friendly and there's no steps on how to actually start the motor in the GUI.
Also, in the hardware setup guide for the Sensorless FOC Middleware, you should mention that if you want to use the backchannel UART to communicate with the GUI, you need to have UART3 wired to the XDS110 UART TX and RX pins.
Basically as it stands nobody outside whoever wrote this thing would be able to use it so any help here would be appreciated!
Munan