Part Number: LAUNCHXL2-RM46
Other Parts Discussed in Thread: HALCOGEN
Tool/software:
Hello experts
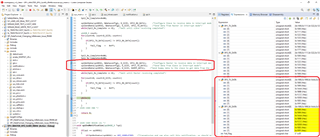
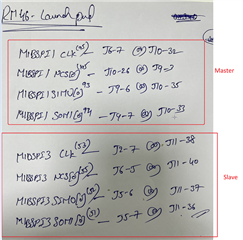
I am trying to make SD card work on the XL2-RM46 launchpad using SPI, and so far I have been able to run the SPI loopback test example using both SPI1 and SPI3. I am able to read the bytes I send on the same SPI using SPITransmitAndReceive function call. However, when I configure SPI1 as master and SPI3 as slave in HALCoGen and transmit on SPI1, followed by a receive on SPI3, I am only able to read 0xFFs. I don't know what I'm missing here. I have tried using both SPI1 and SPI3 as master and the other one as slave by configuring it appropriately in HALCoGen. The SPI1 CS is hooked to the correct CS pin on SPI3, I believe. I am attaching the hcg file with this post.
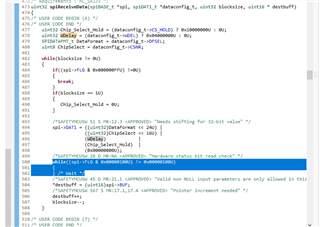
Weird part is that I am able to probe and observe the data being sent out AND received on the SPI1 MOSI and SPI3 SIMO pins (on an oscilloscope), but reading the data on SPI3 using spiReceiveData still gives me 0xFFs. Is there some other configuration that I am missing?
Link to hcg file: https://drive.google.com/file/d/1DBFMI_IWdv25ezCjZ4Xps28AMqoKYDnf/view?usp=drive_link
Thank you for your time
Sincerely
Karan