Part Number: AM2431
Tool/software:
Hi all TI experts:
I am using the AM2431 with FreeRTOS as the system. In one of the threads, I need to control multiple GPIO high/low signals as control signals to manage a peripheral. I am using a for loop to output continuous signals, but I have noticed a longer delay when setting the signal low.
void
my_delay(uint32_t ticks) {
volatile uint32_t delay;
hGpio1->BANK_REGISTERS[0].SET_DATA = 0x00000400;
for (delay = 0; delay < ticks; delay++) {
NOP_DELAY;
}
hGpio1->BANK_REGISTERS[0].CLR_DATA = 0x00000400
}
for (scanline = 18; scanline > 0; scanline--) { /
for (channel = 16; channel > 0; channel--) {
for (driver = 20; driver > 0; driver--) {
value = hGpio1->BANK_REGISTERS[0].OUT_DATA;
value |= (((Value1 << 1);
value |= (((Value2 << 10);
value |= (((Value3 << 13);
value |= (((Value4 << 21);
value |= (((Value5 << 22);
value |= (((Value6 << 30);
hGpio1->BANK_REGISTERS[0].OUT_DATA = value;
my_delay(delayTime);
}
}
}
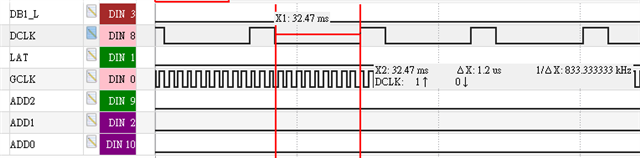
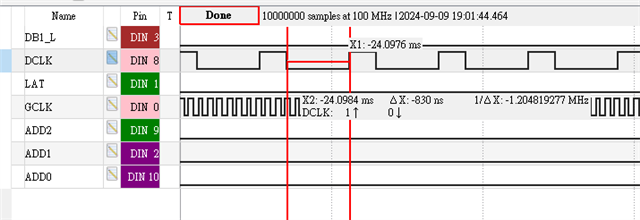
In order to make my GPIO control as stable as possible, I didn’t use vTaskDelay. Instead, I used a for loop with NOP_DELAY inside to prevent the process from switching to other threads. However, I noticed something unusual with the output waveform. I added a GPIO toggle before and after the delay, and by observing this GPIO with a logic analyzer, I found that the low time is almost twice as long as the high time. I didn’t find an option to set the GPIO speed in syscfg, but a simple for loop shouldn’t have this effect. I also tried removing the value operation, but the low time still didn’t decrease. Is there any way to improve this?
best regards,
Larry