Part Number: MSPM0G3507
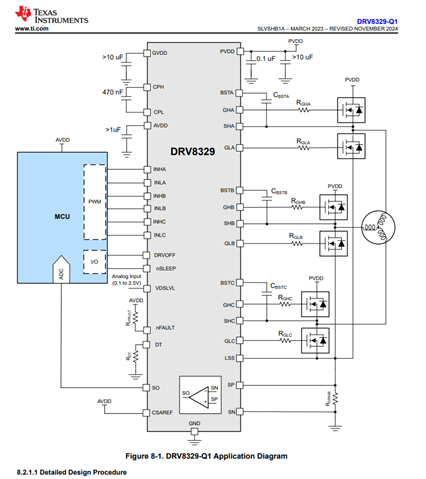
Other Parts Discussed in Thread: DRV8329, DRV8329-Q1
Tool/software:
Hi expert,
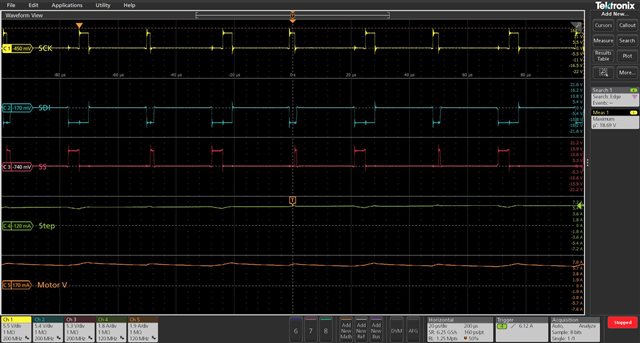
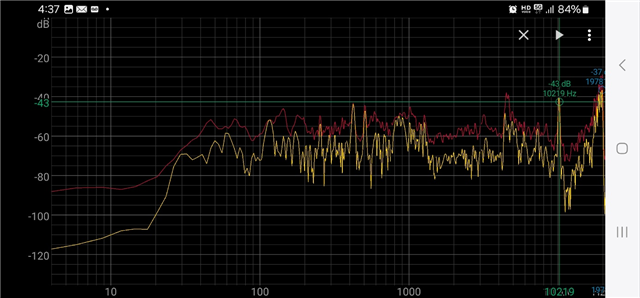
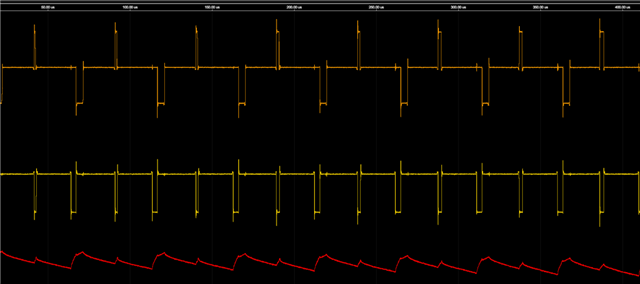
When the motor rotates, I hear high-frequency sounds in the 5khz and 10khz frequency range. What is this?
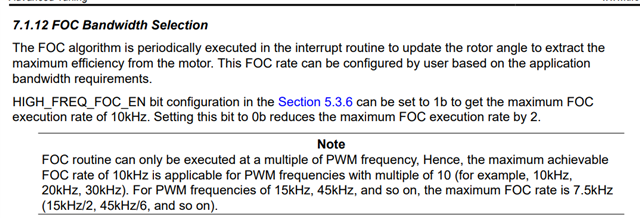
And could this feature possibly cause noise?
MCUs from other companies with the same motor do not produce such high-frequency sounds.
I think this is a software issue.
The software uses the same algorithm used in the example: C:\ti\mspm0 sdk_2_03_00_07\examples\nortos\LP MSPM0G3507\motor_control_pmsm_sensorless_foc\sensorless-foc DRV8329.
Please check this issue, and let me know if you need more information.
Best regards,
Donguk


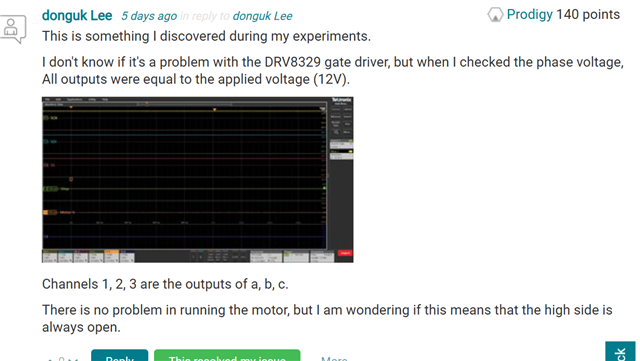
 -> i Think that must be fixed.
-> i Think that must be fixed.