Other Parts Discussed in Thread: DRV8329
Tool/software:
Hi experts,
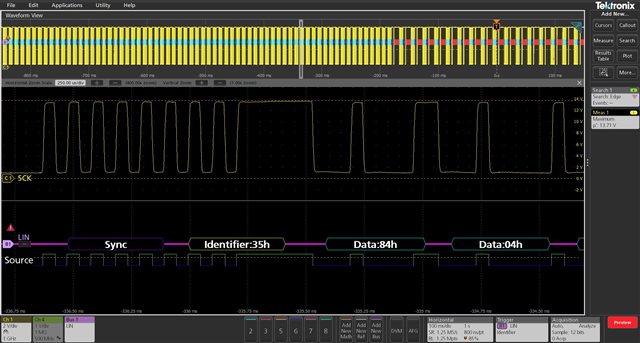
LIN communication is cut off while the motor is rotating. The result under normal operation is the waveform above.

However, LIN communication is suddenly cut off during motor operation. The abnormal waveform is as above.
The code used is "C:\ti\mspm0_sdk_2_02_00_05\examples\nortos\LP_MSPM0G3507\lin\lin_responder"
I put this in C:\ti\mspm0 sdk_2_03_00_07\examples\nortos\LP MSPM0G3507\motor_control_pmsm_sensorless_foc\sensorless-foc DRV8329.
(At this time, Lin communication was disconnected, so the function applicationLowPriorityRun(g_pMC_App) in the timer interrupt of the code was replaced with a flag and Moved to while(1) in main.c.
Please tell me why communication is interrupted midway.